I ordered the Flightaware bundle from WiFi Expert (antenna, USB pro stick dongle, cable and filter) via there eBay store The idea was to compare it my homemade antenna and NooElec dongle setup. While I know this is not the ideal setup with the LNA inside the dongle it is a worth testing to see what the results can be with a simple off the self setup.
I initially set it up in the backyard, to verify that it was indeed in operating order – it was. Always better to find out before you install it on the roof 🙂 Two days running it there indicated that the performance was no worse than my current setup. This was promising as my backyard isn’t ideally suited for line of sight to anything and to pretty much get the same response as the antenna on my roof indicated the results should be good.
Update 2016-06-04 & 06-25
Roof installation happened today. Quite painful with the high pitched roof and plenty of bird shit under the TV antenna. I removed the old home made antenna and replaced it with the Flightaware one. It’s nice to use proper pole clamps and fixings rather than my hacked up pipe clamps and cable ties – the result felt much more solid.
The old antenna also showed signs of rusting at the F connector – I wonder how long it would have survived in working order? Maybe I should tape up the connectors using self amalgamating tape? Something to look into I guess.
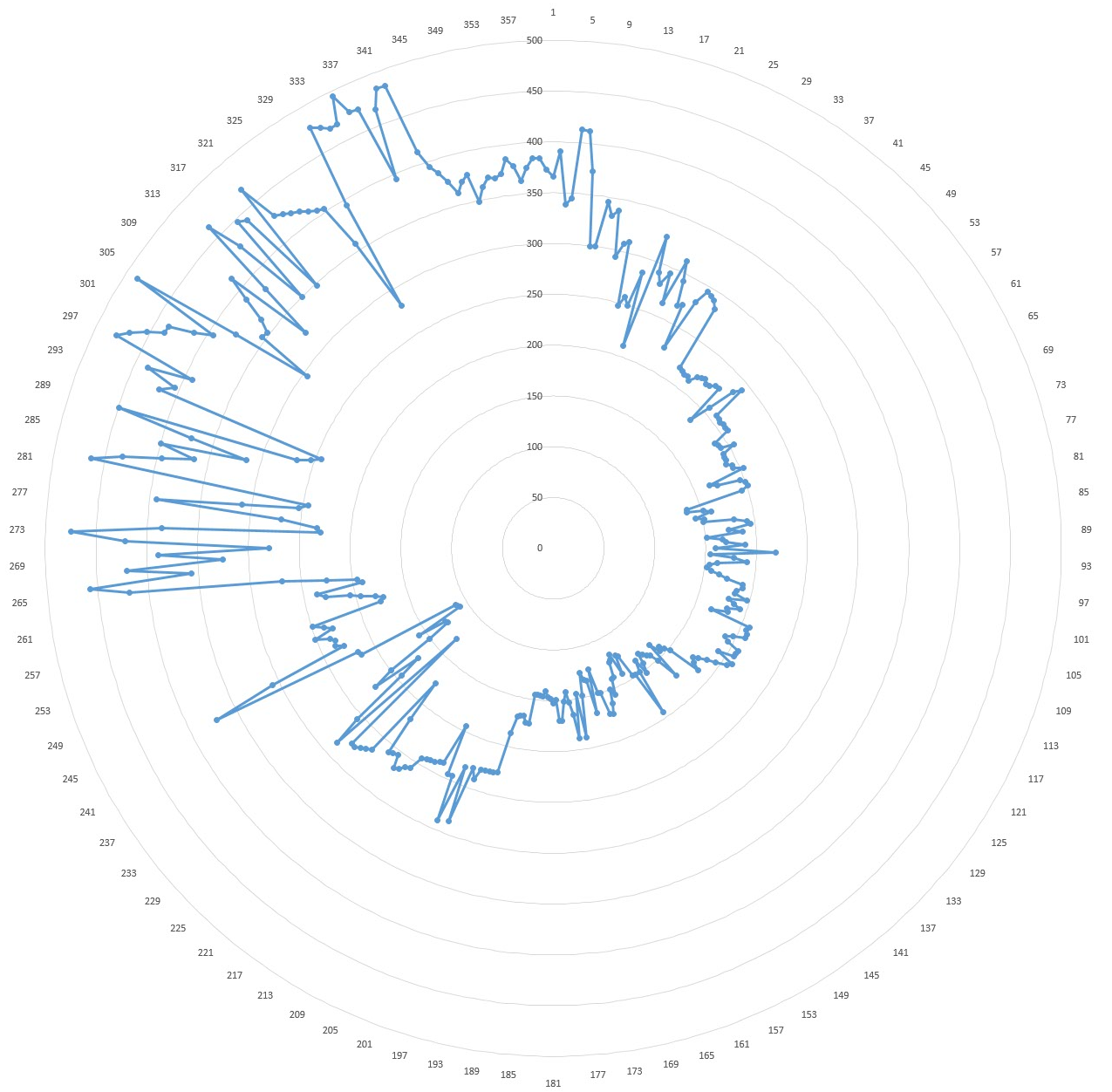
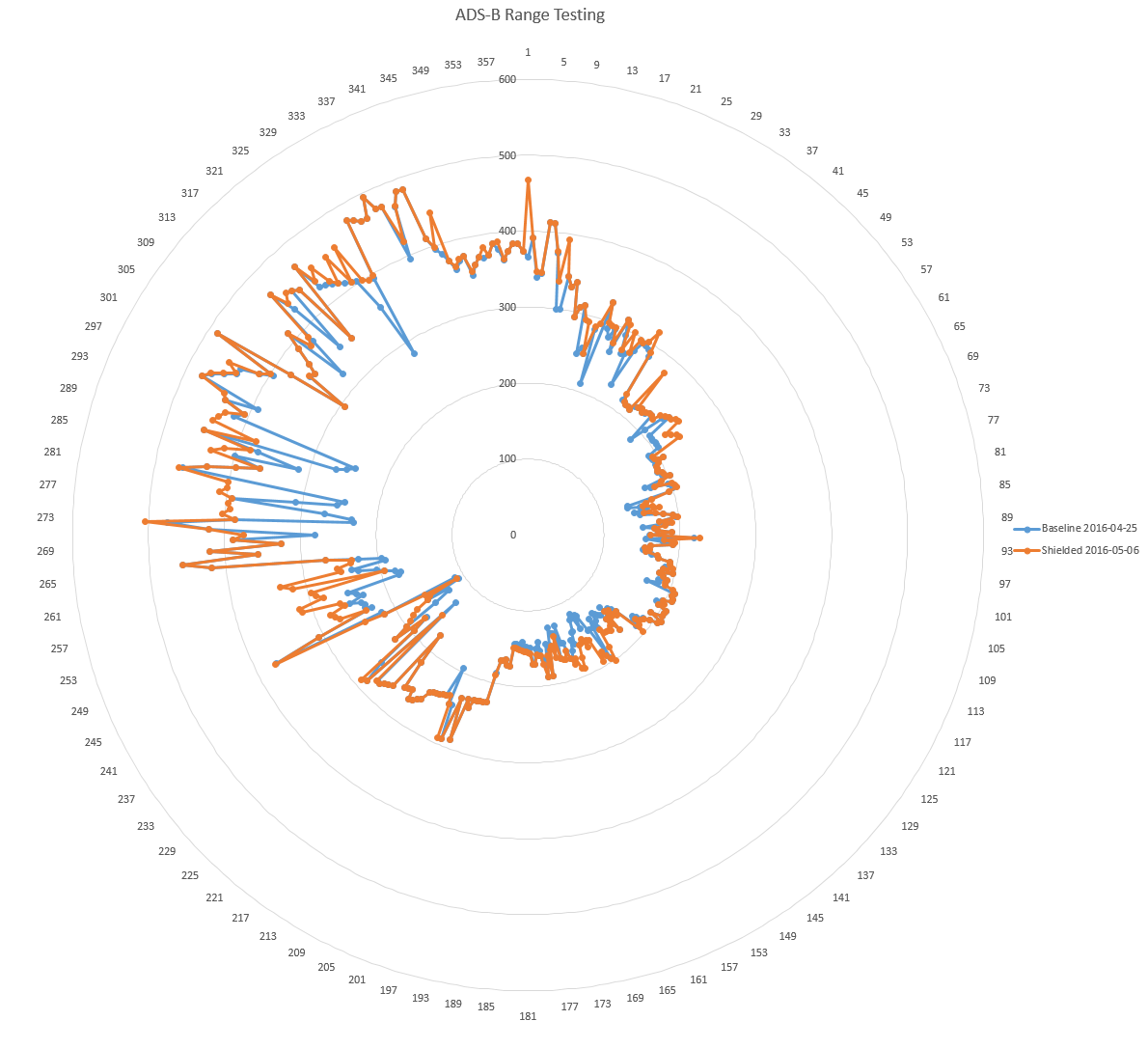
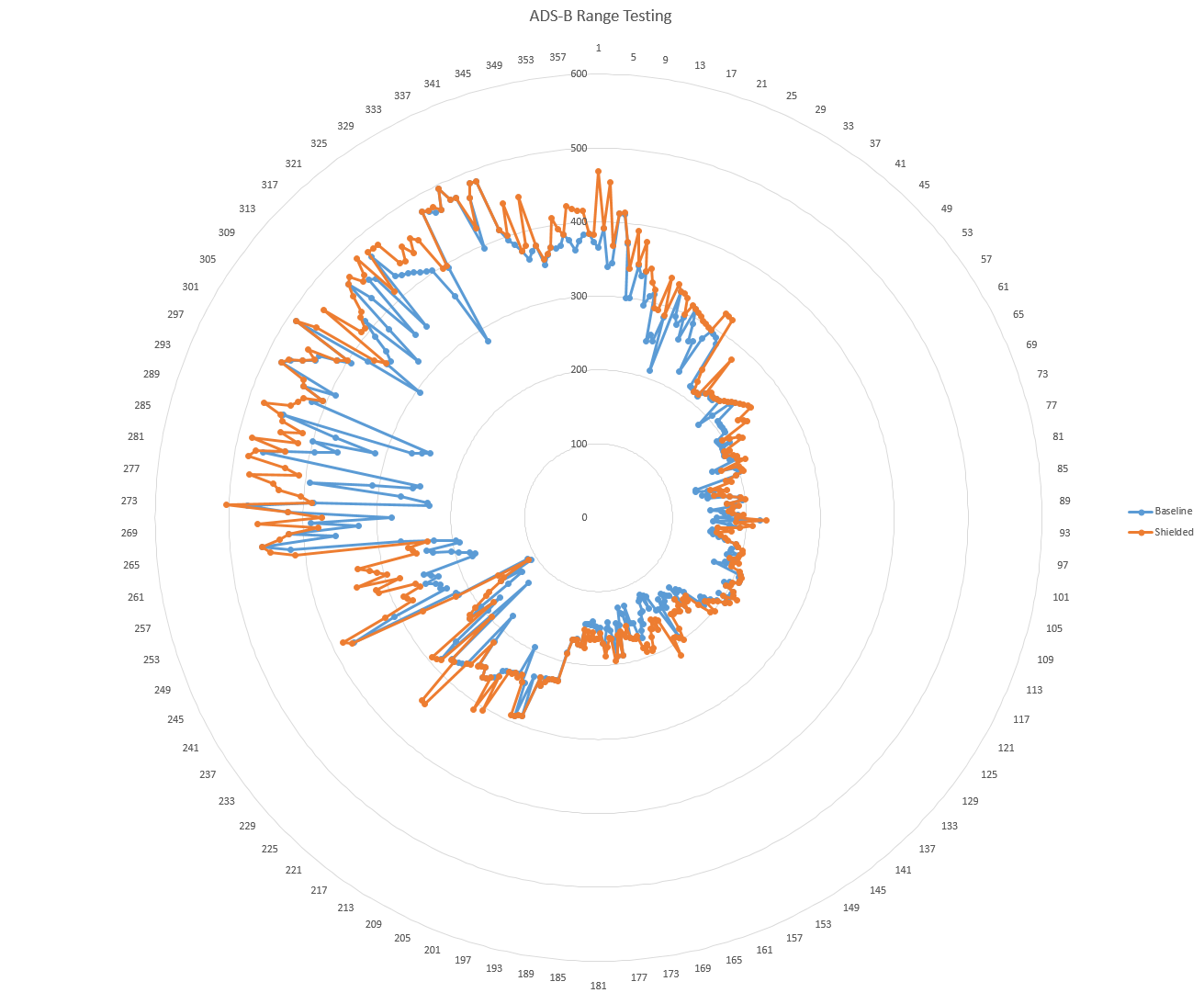
So one day later here are the results.
Range: Generally much better, the long range detection stretching out towards 500 km. I still have issues with detection towards the east sue to the hills which is expected. Range isn’t everything of course.
Message Count: The other major difference I can see is many more messages per second.
I have been able to detect planes landing and tacking off Adelaide airport while they are still located within the airport grounds. Previously I wouldn’t detect them until they were much further out/higher in altitude. A similar result can be seen at Parafield airport. The updated ModesDeco2 map really shows the extended range.



Conclusion – is it worth it?
If I was just starting and wanted something simple that just works then yes I’d probably pay for the bundle and it would be job done. The range and performance is very good.
However if you prefer to make your own then you can get almost the same results with a $10 dongle, some coax cable and a bit of handy work.
If you add an LNA and ADS-B filter to your home brew setup I think you would get the same if not better results than the Flightaware bundle – and this might be my next test.