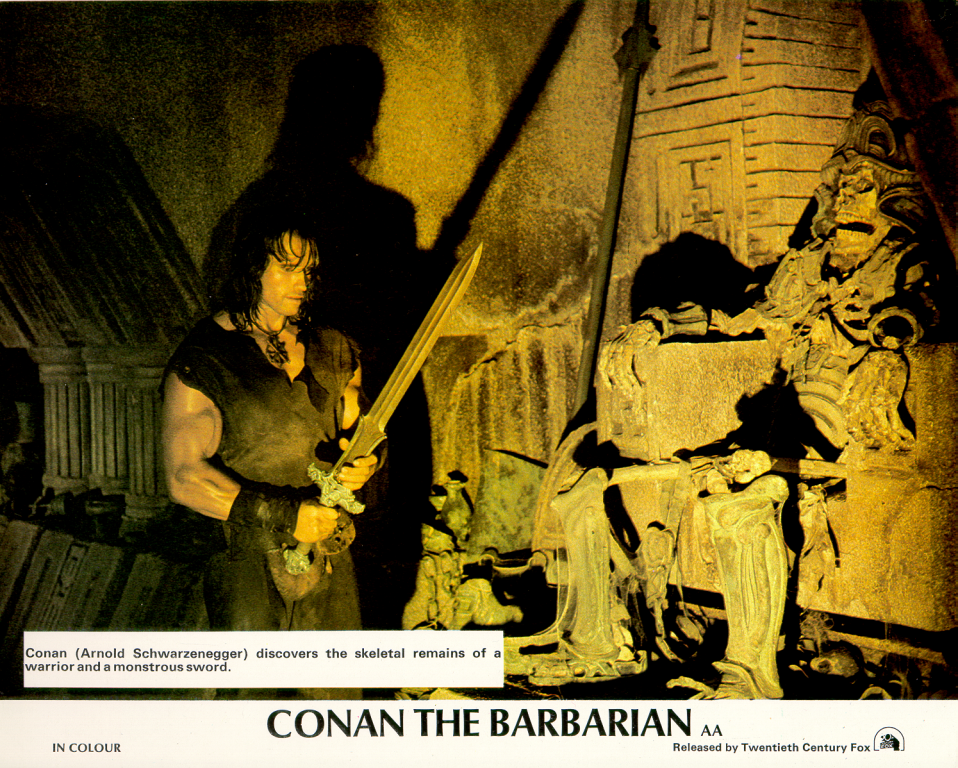
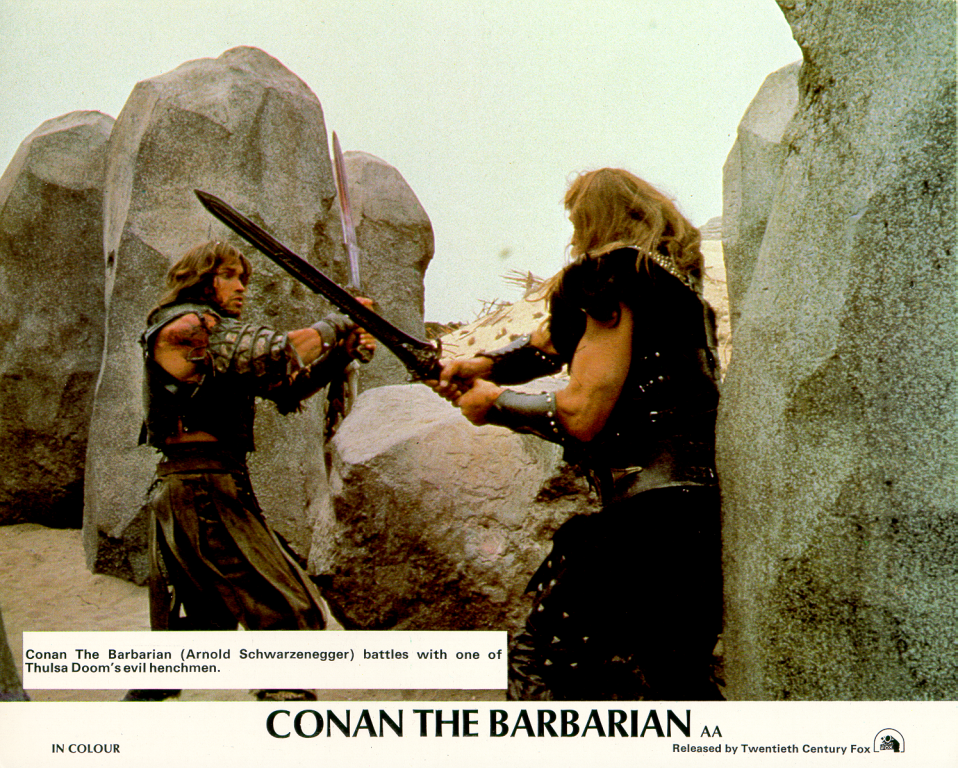
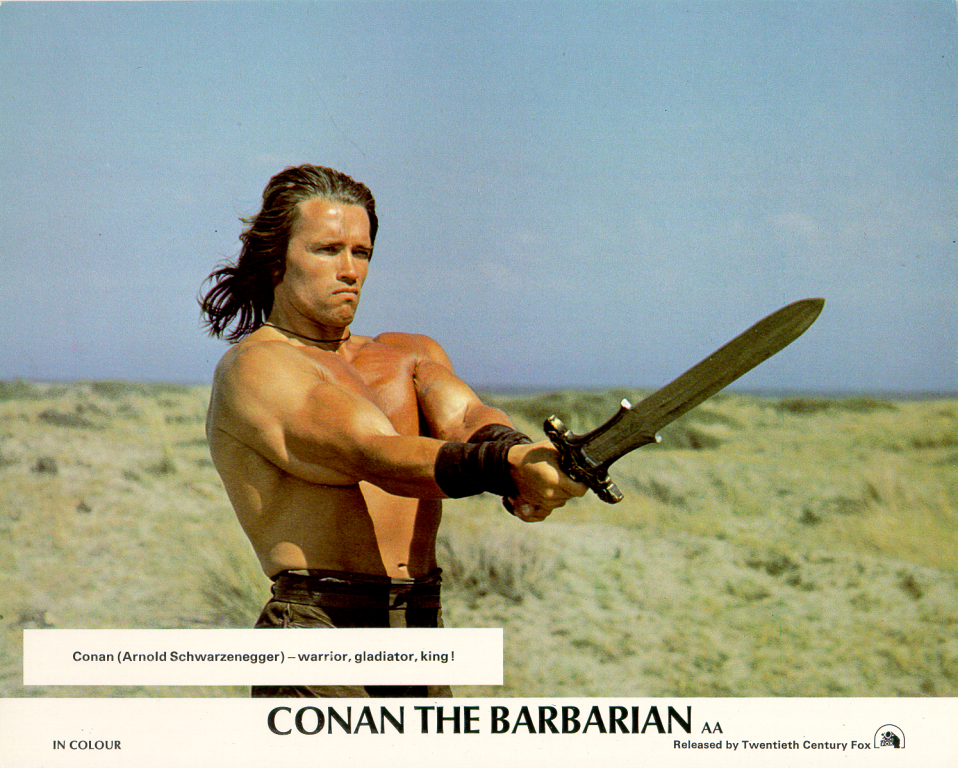
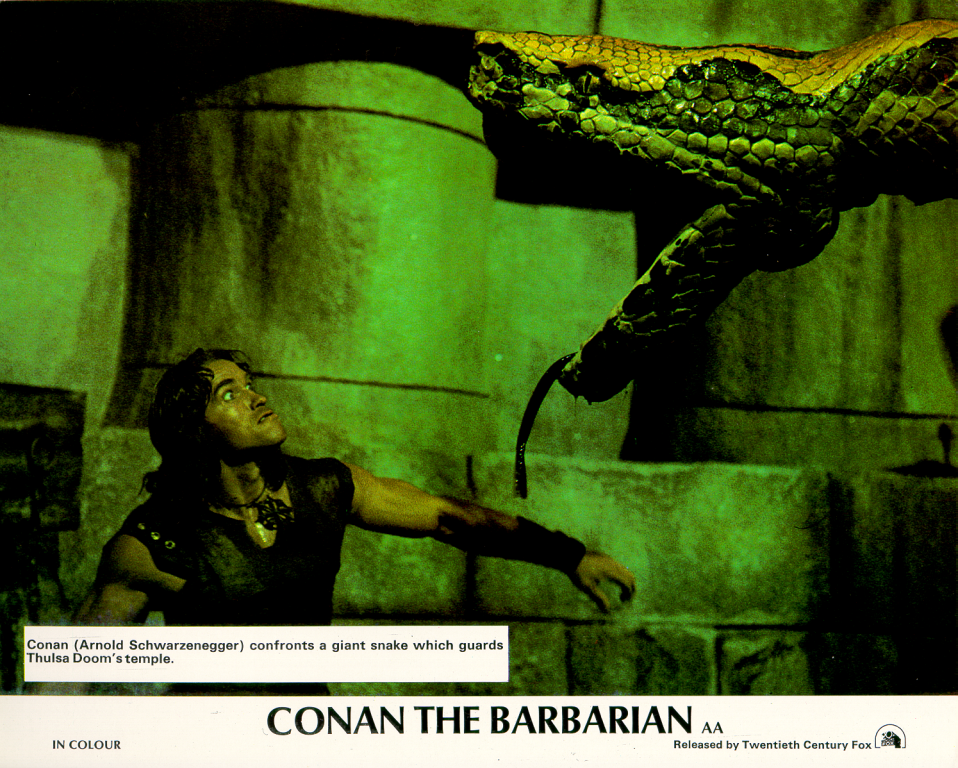
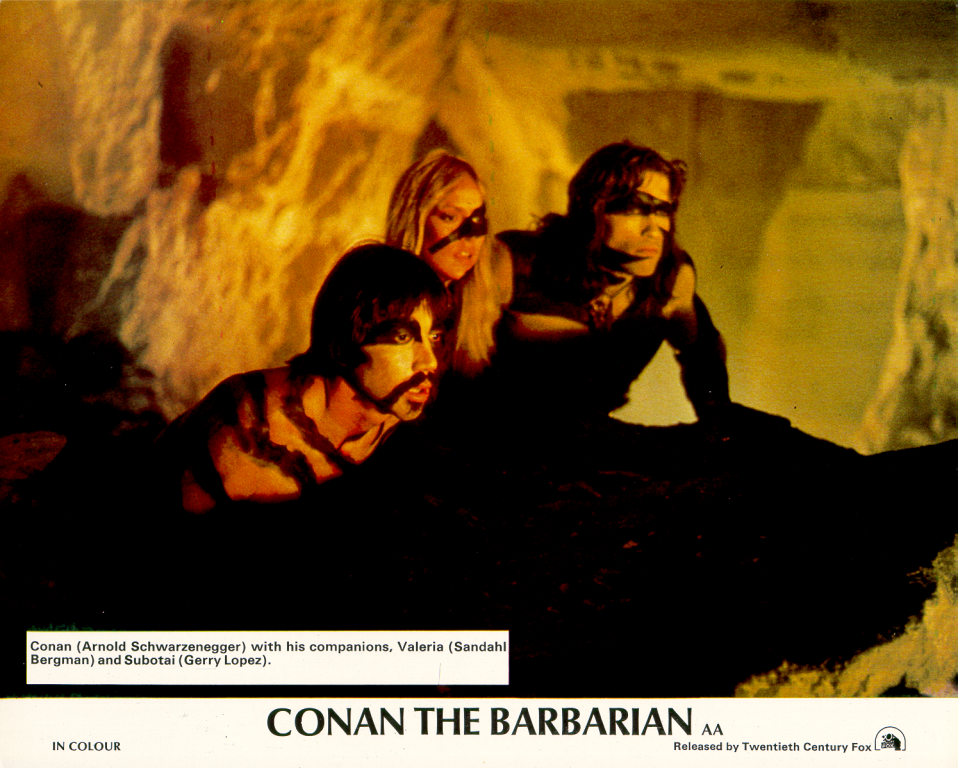
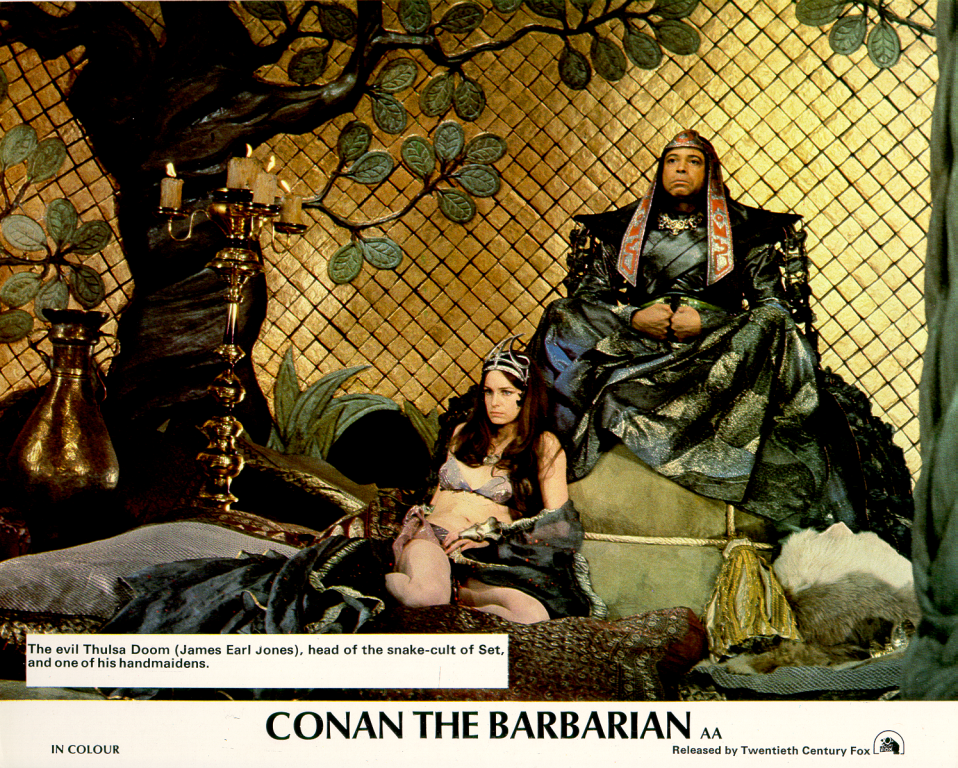
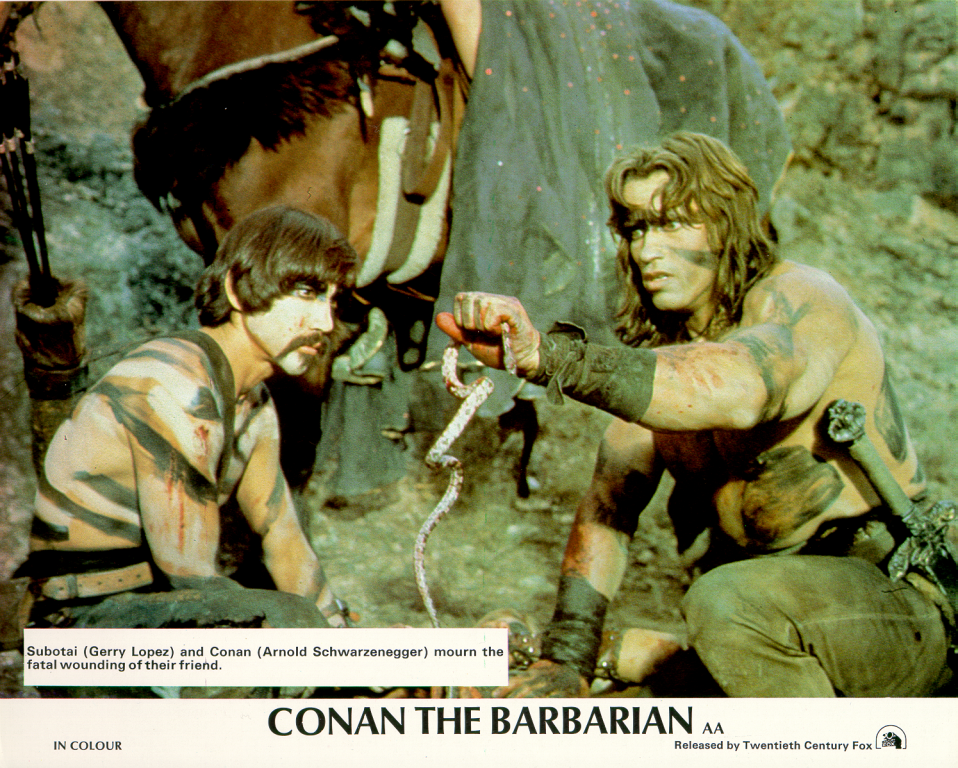
The classic Arnold Schwarzenegger movie.
Author: futuretab

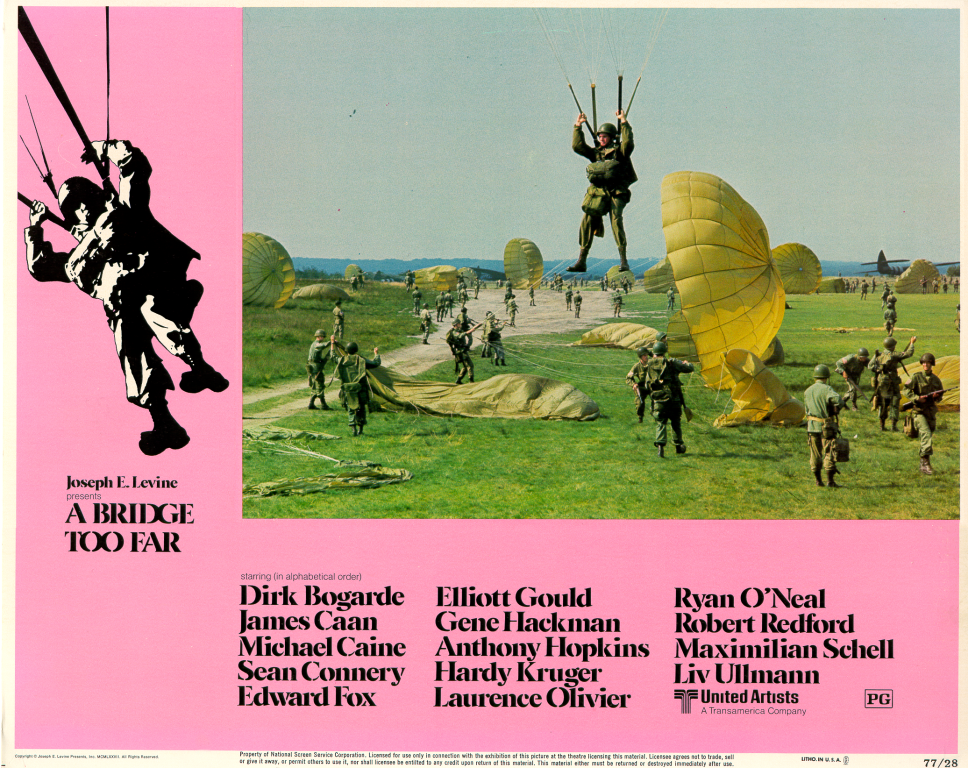
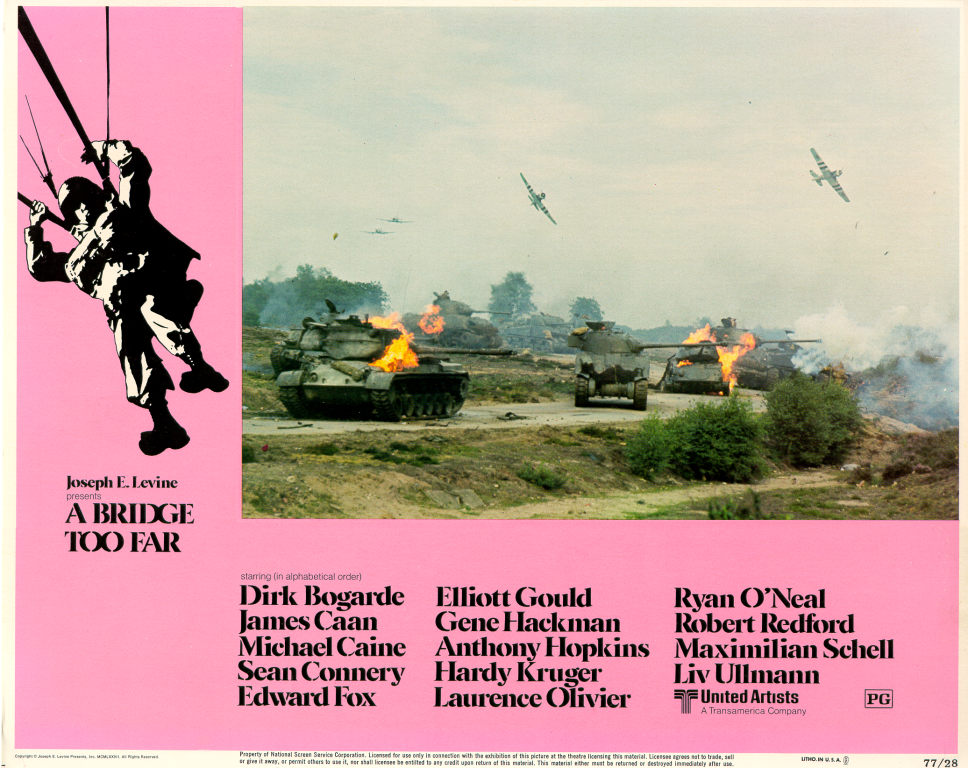
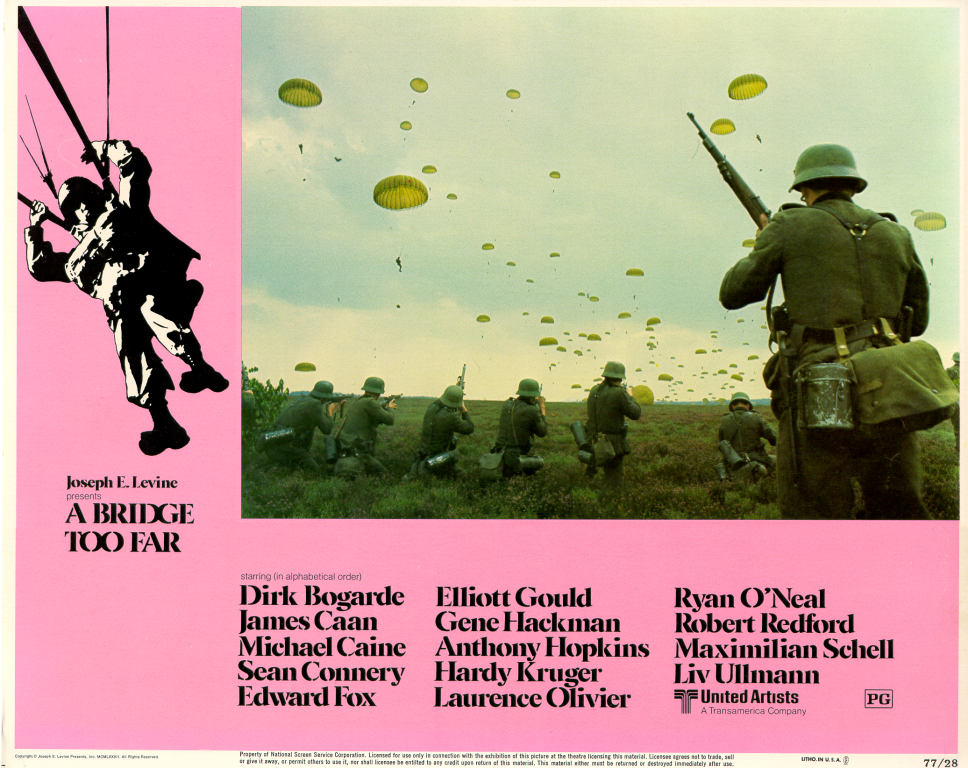
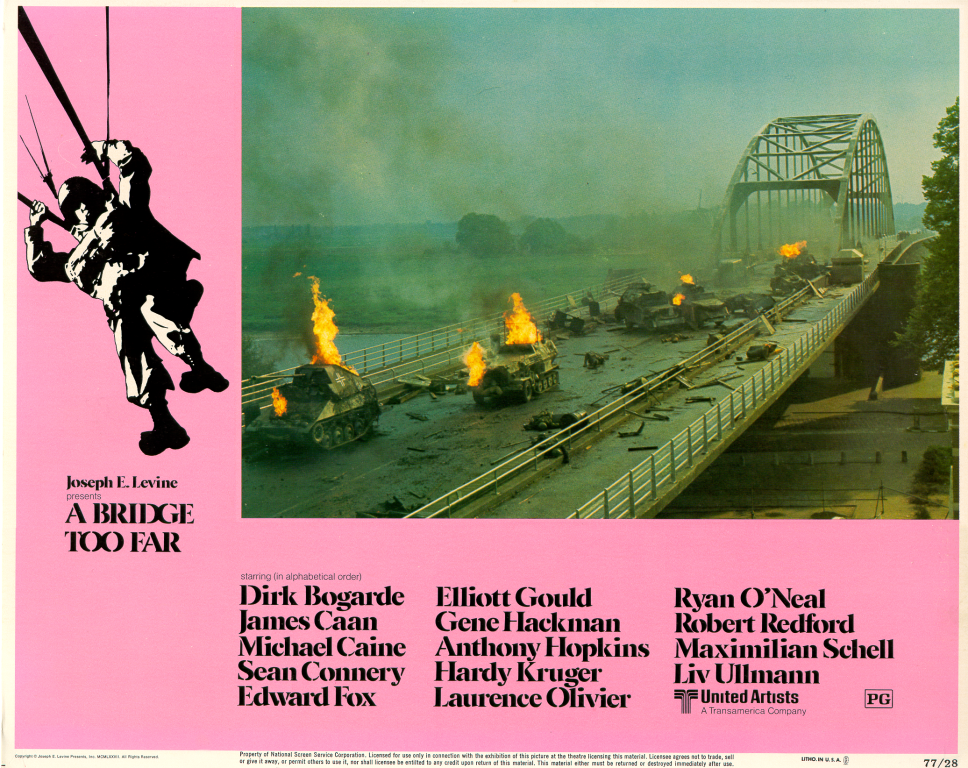
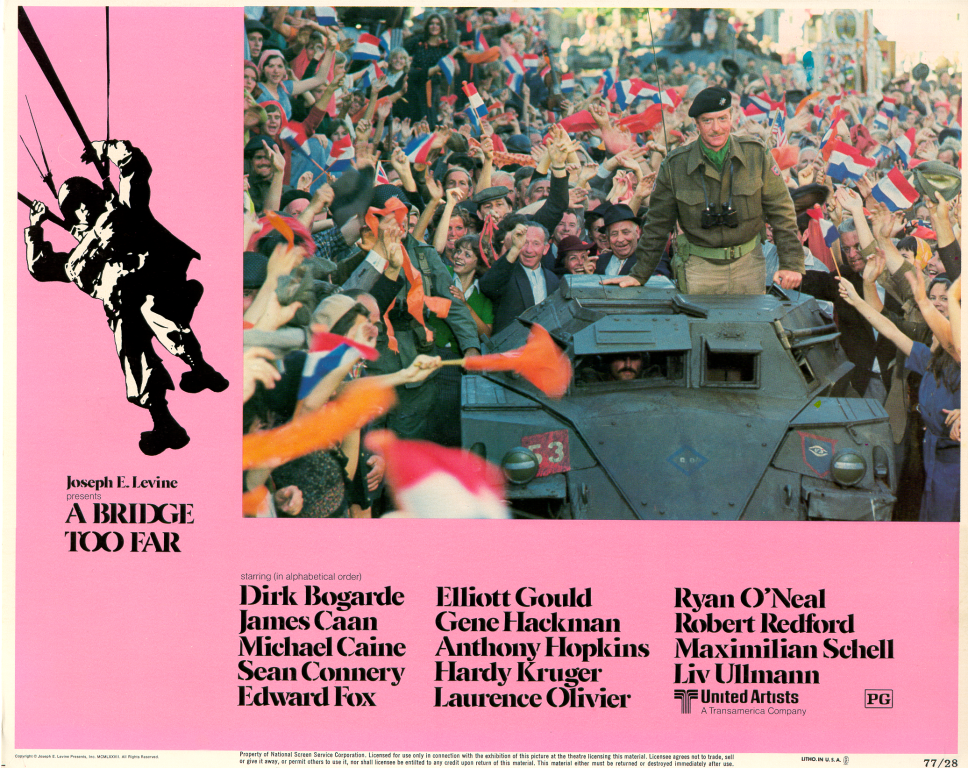
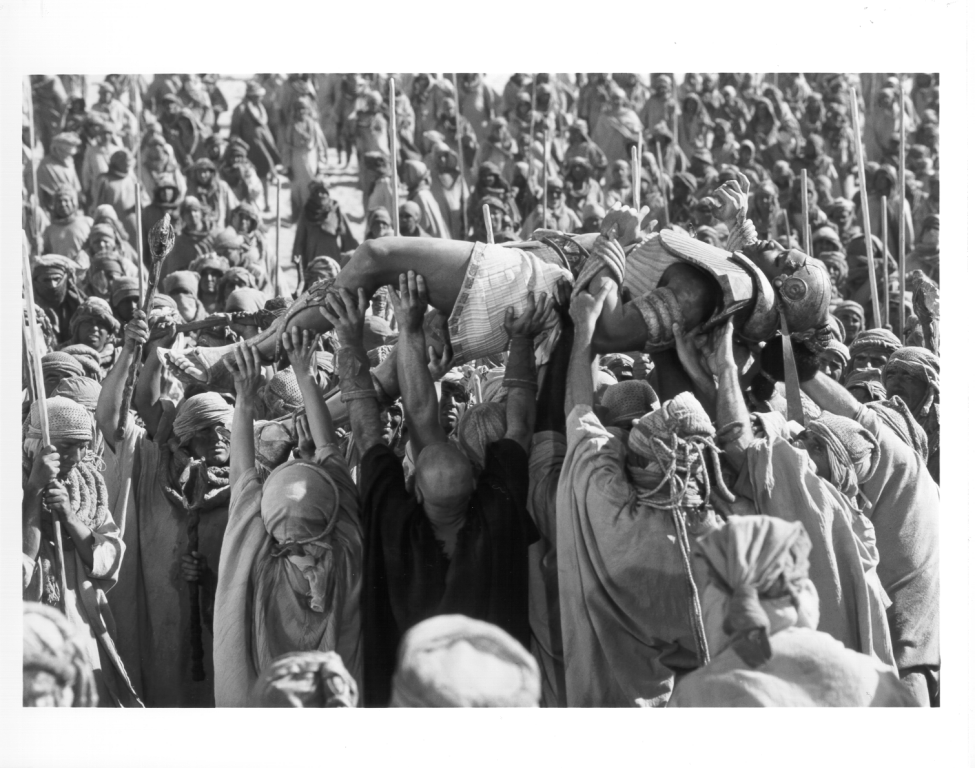
A Bridge Too Far
Half the card is the cast list – I guess no one wanted to be left out?

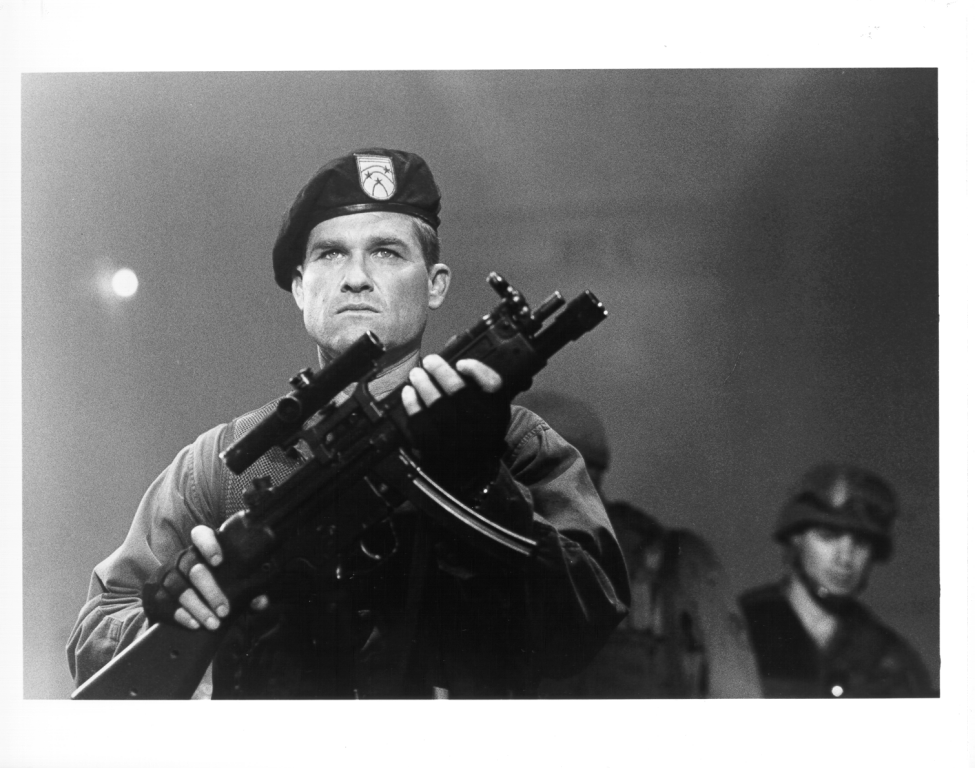
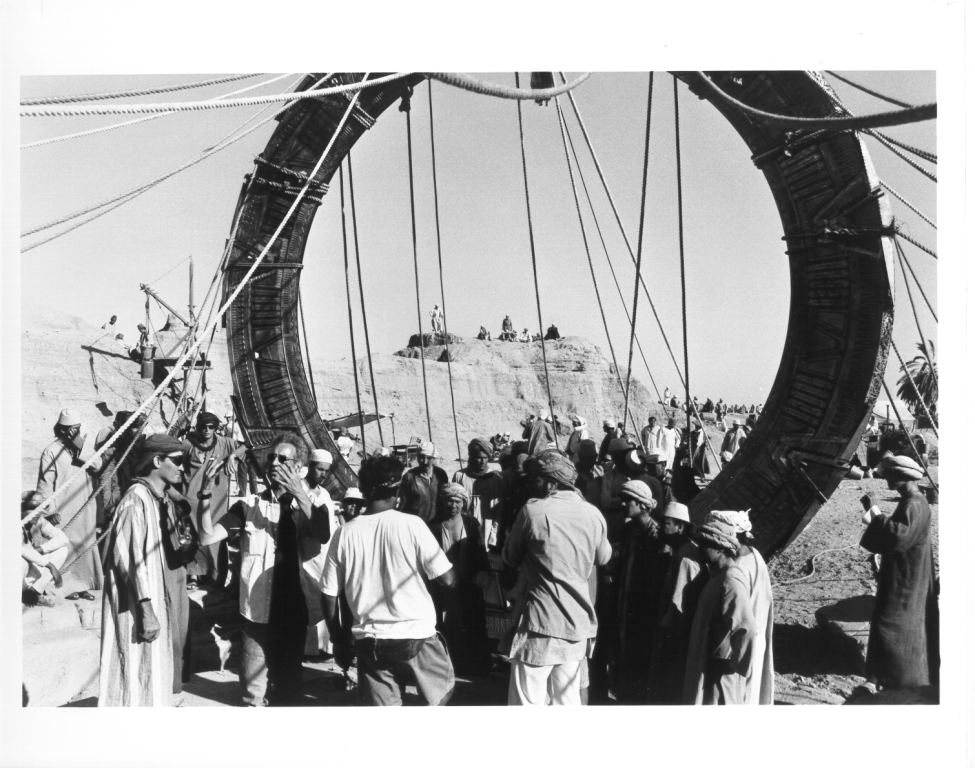
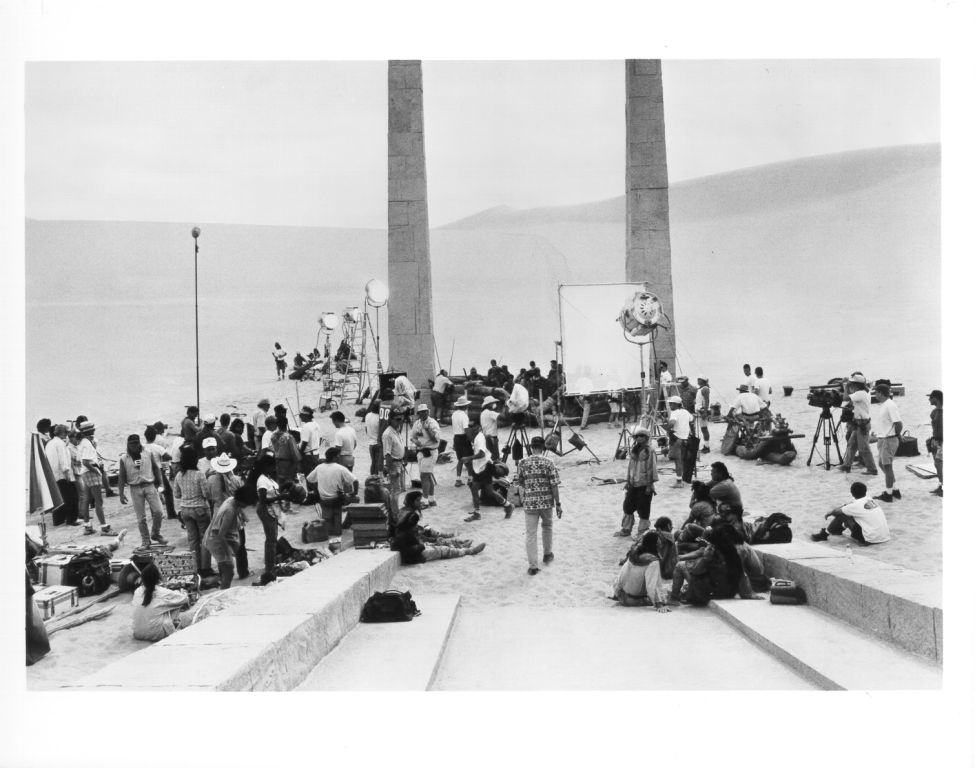
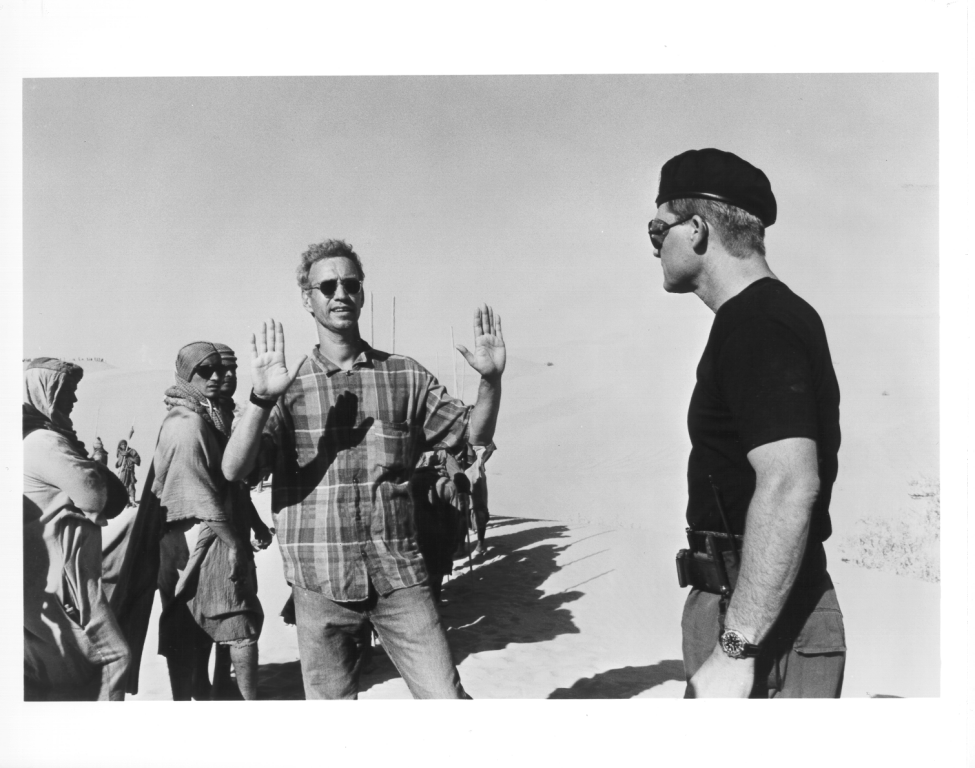
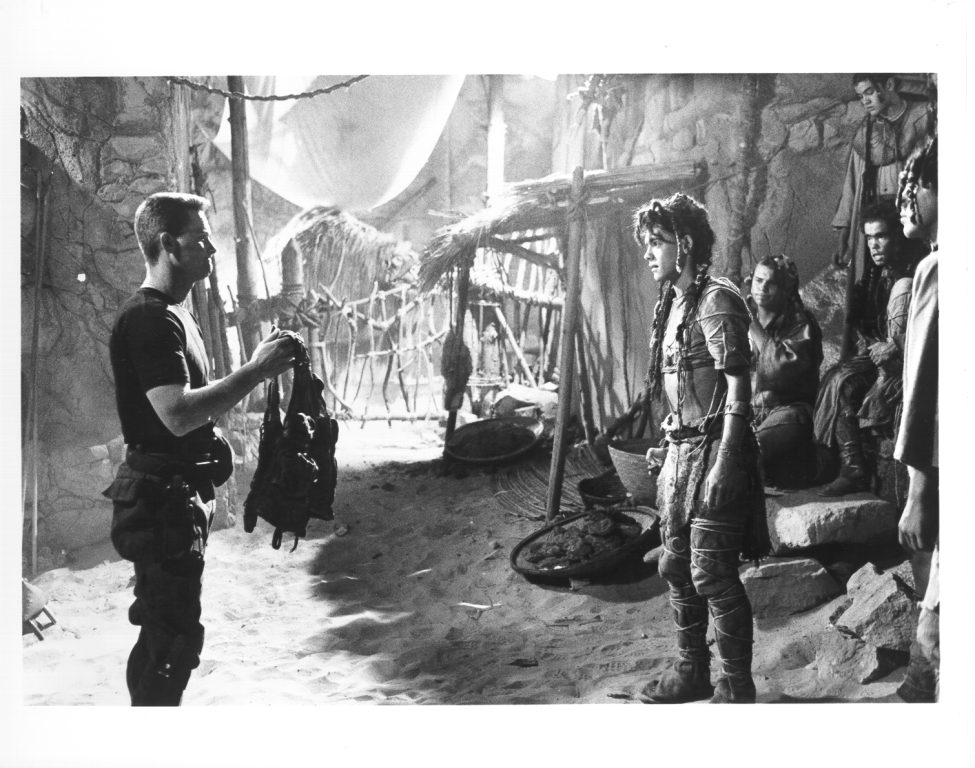
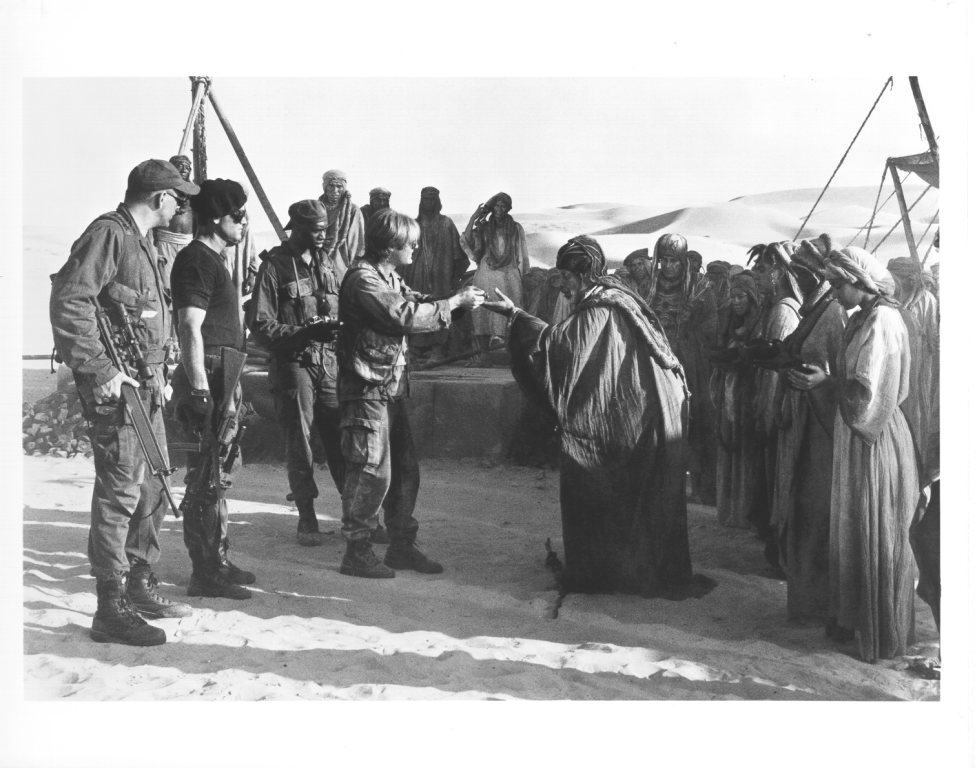
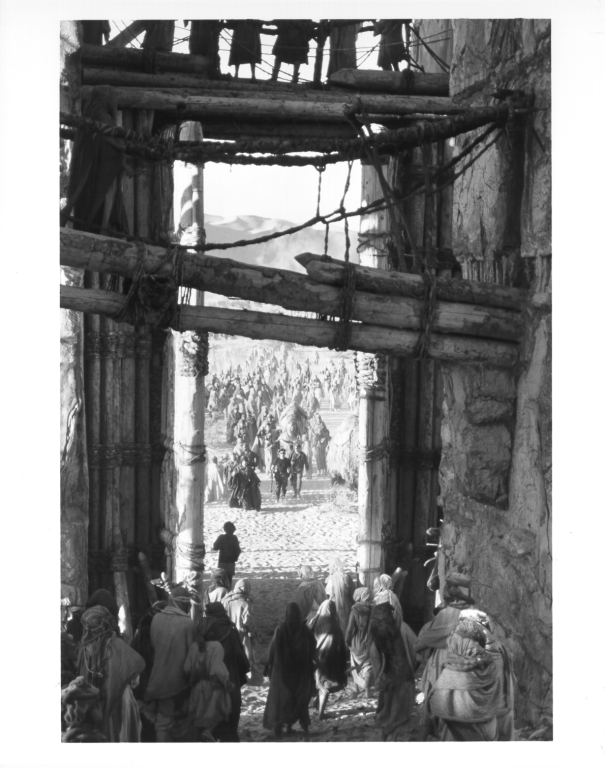
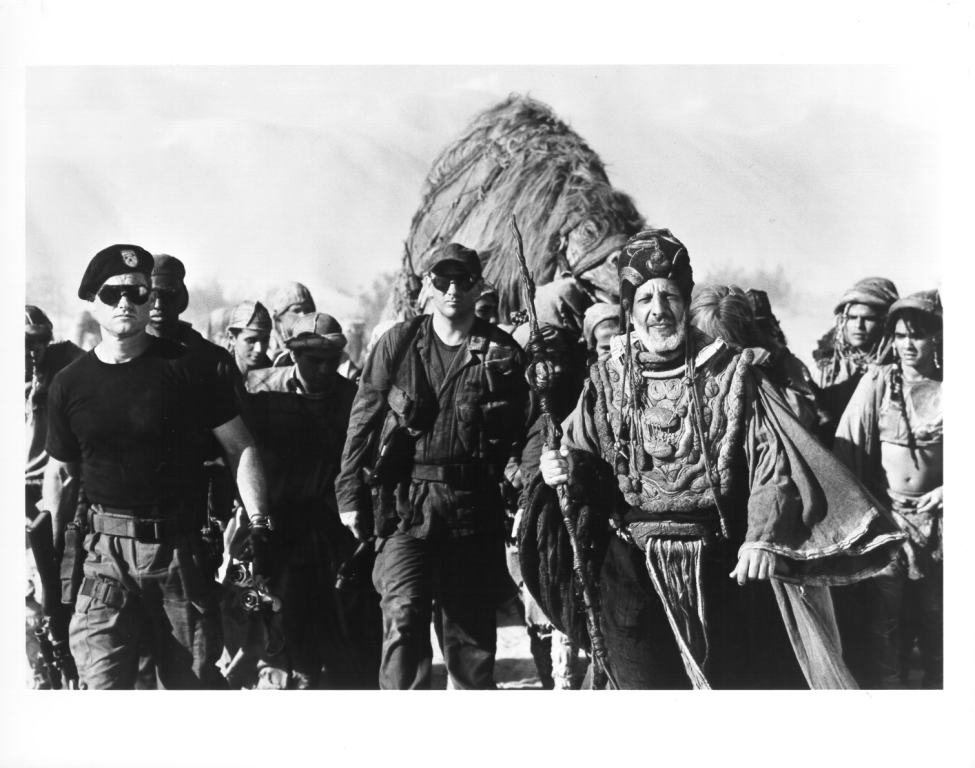
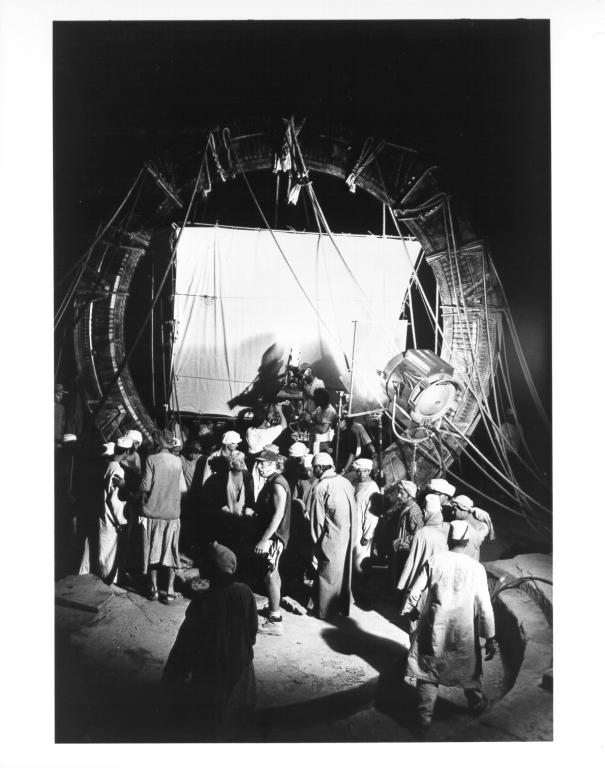
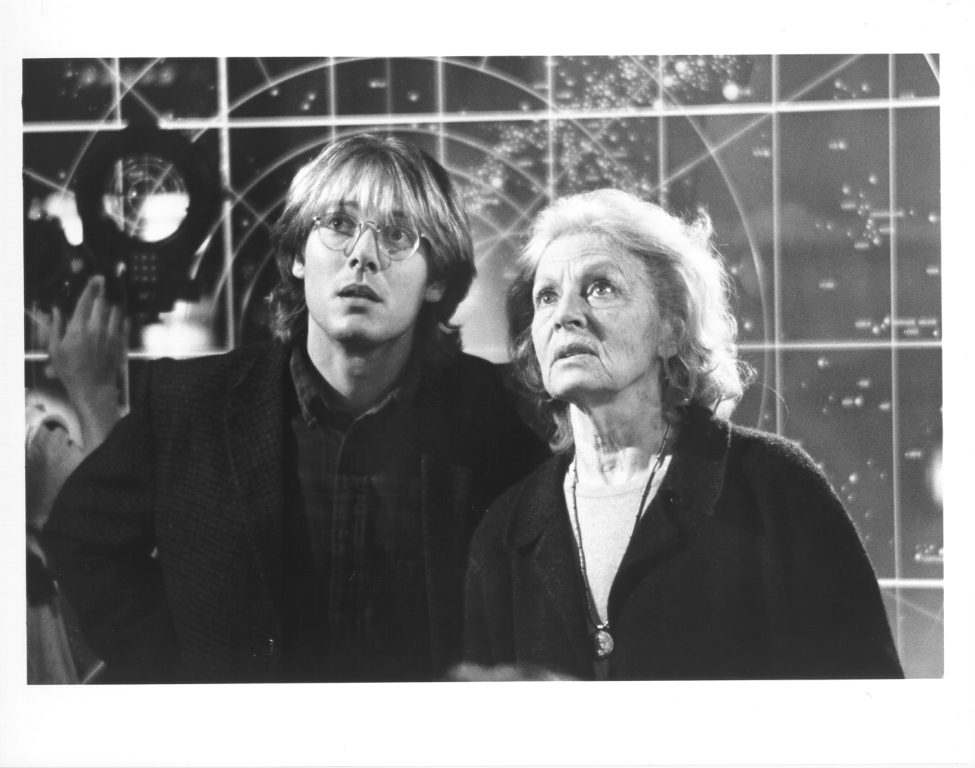
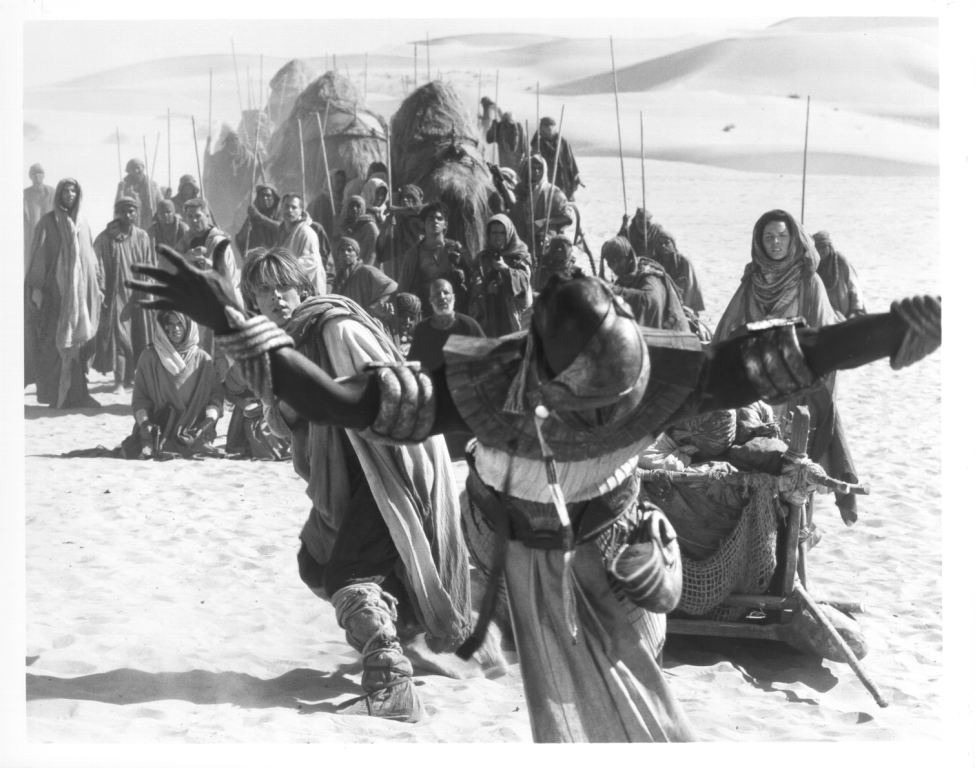
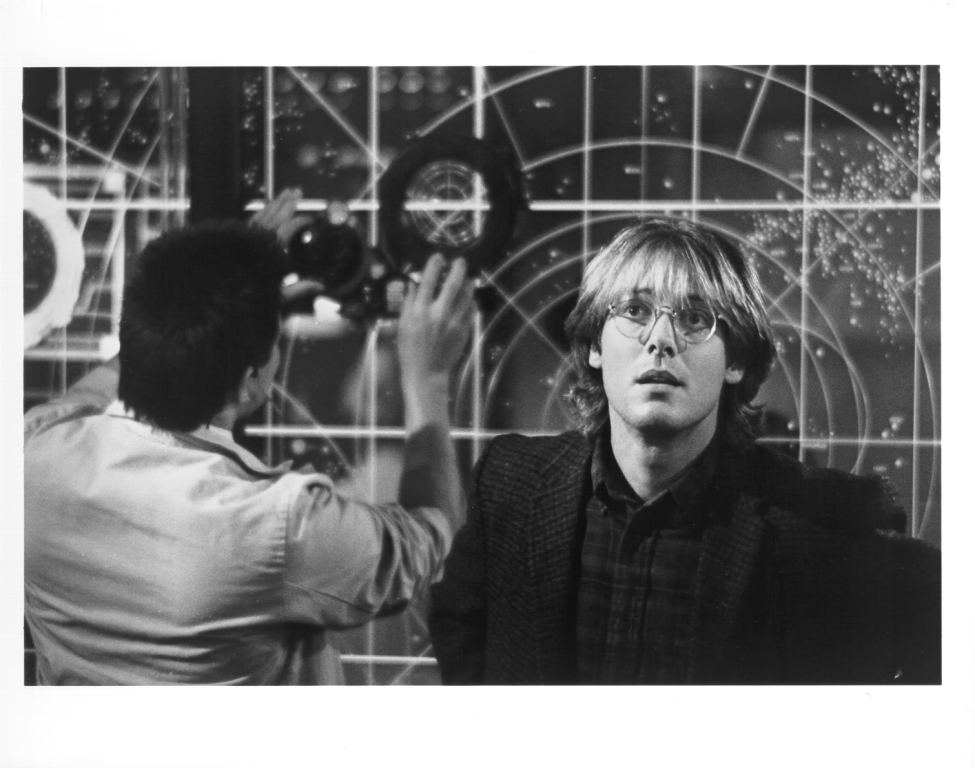
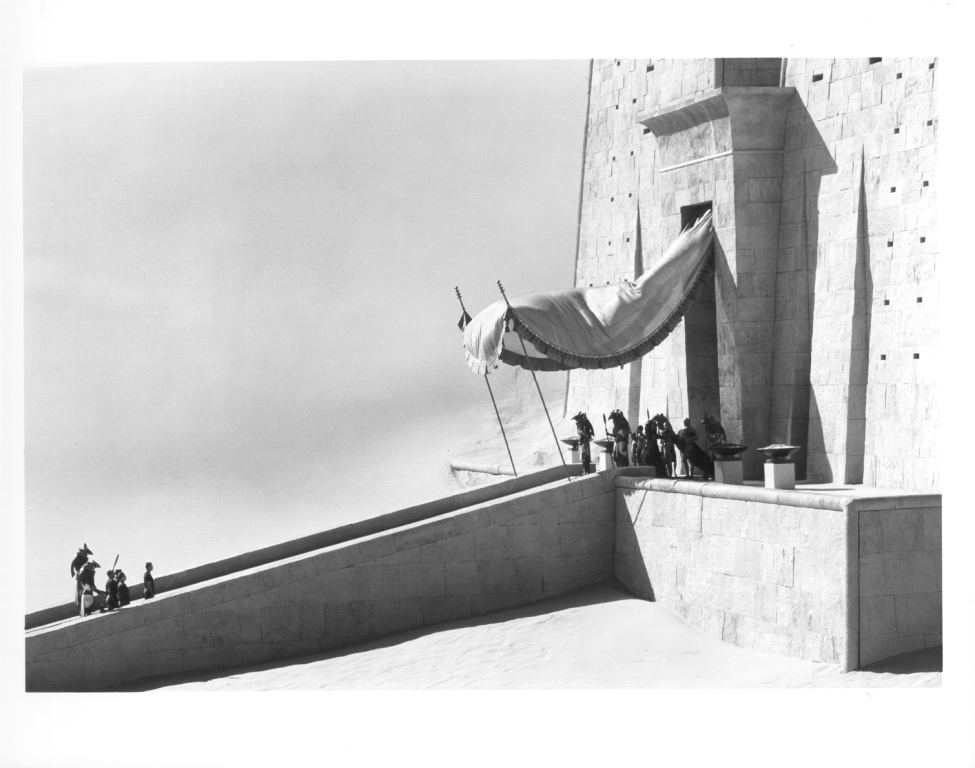
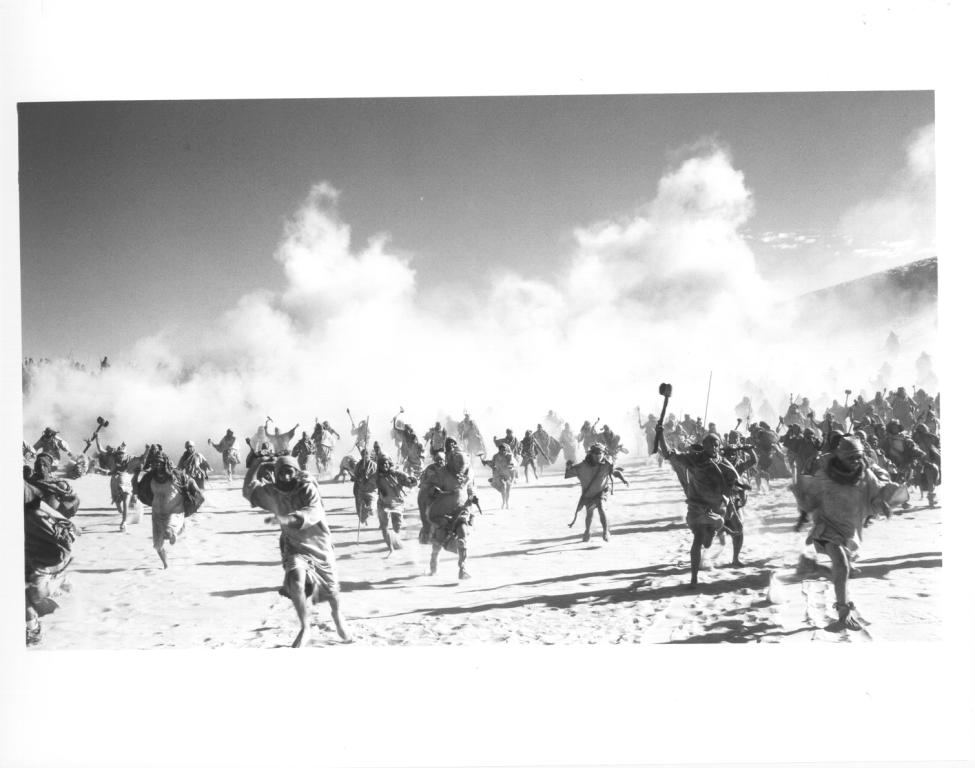
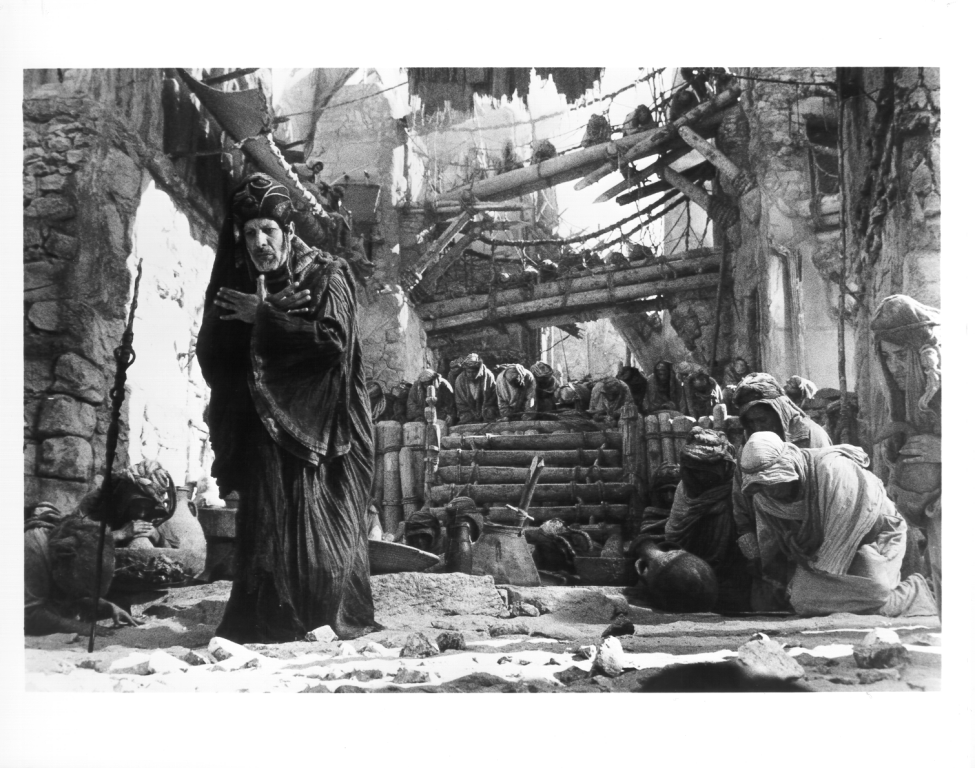
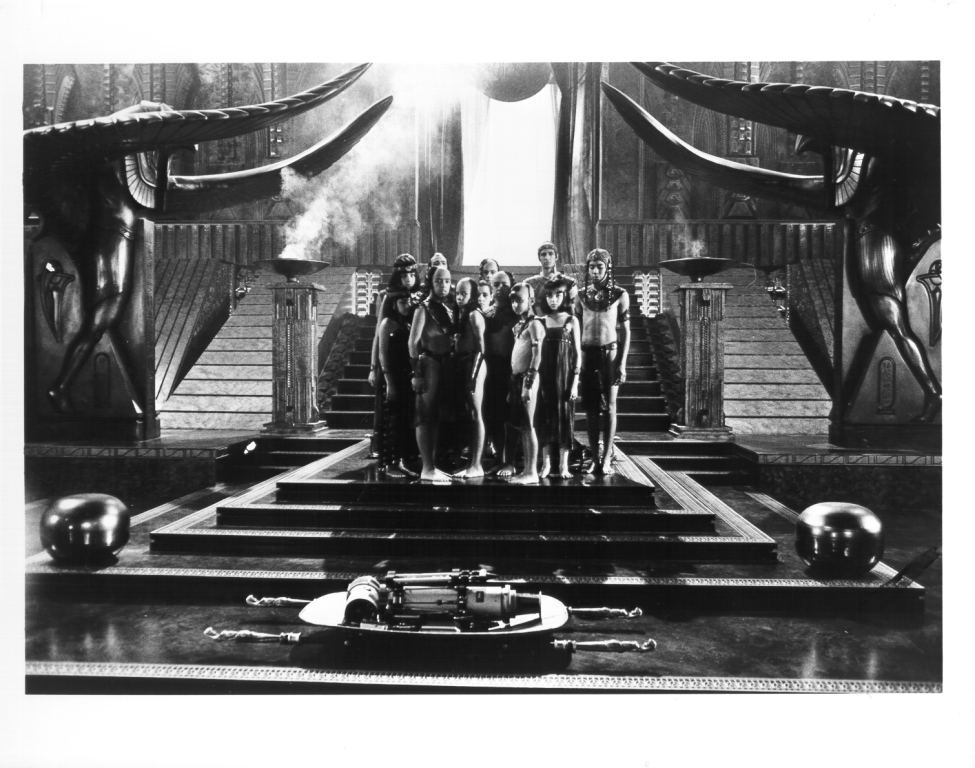
Stargate
The original Stargate from 1994 was pretty good movie. I remember watching most of these movies at a friends house, he had a nice collection of laserdiscs, a three beam CRT projector and a cool sound system.
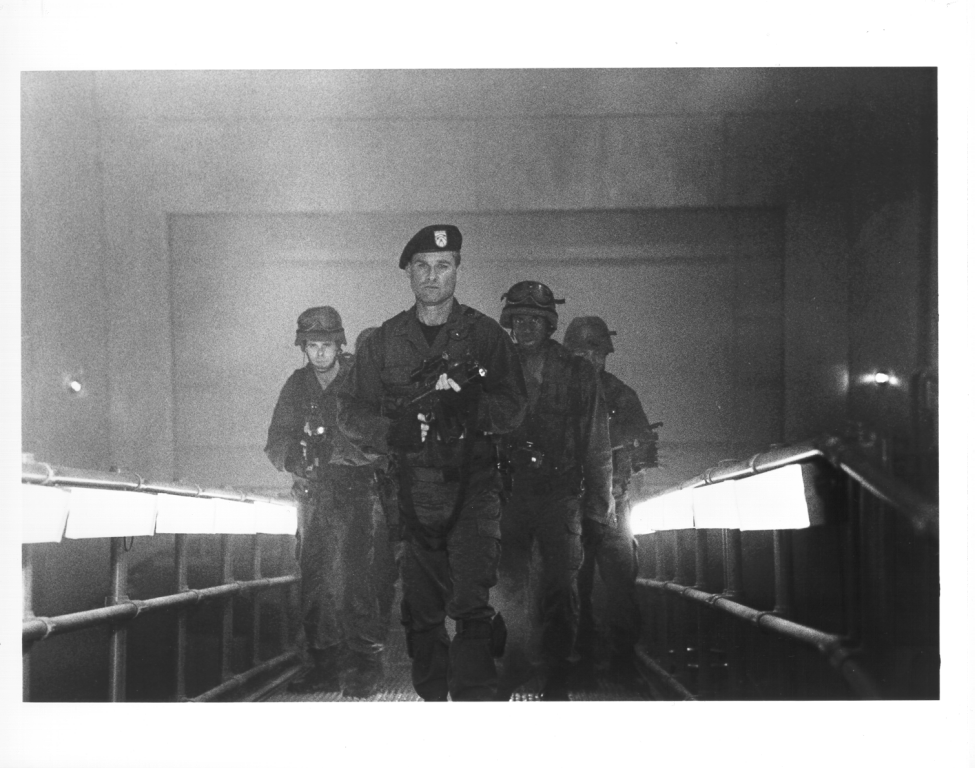
















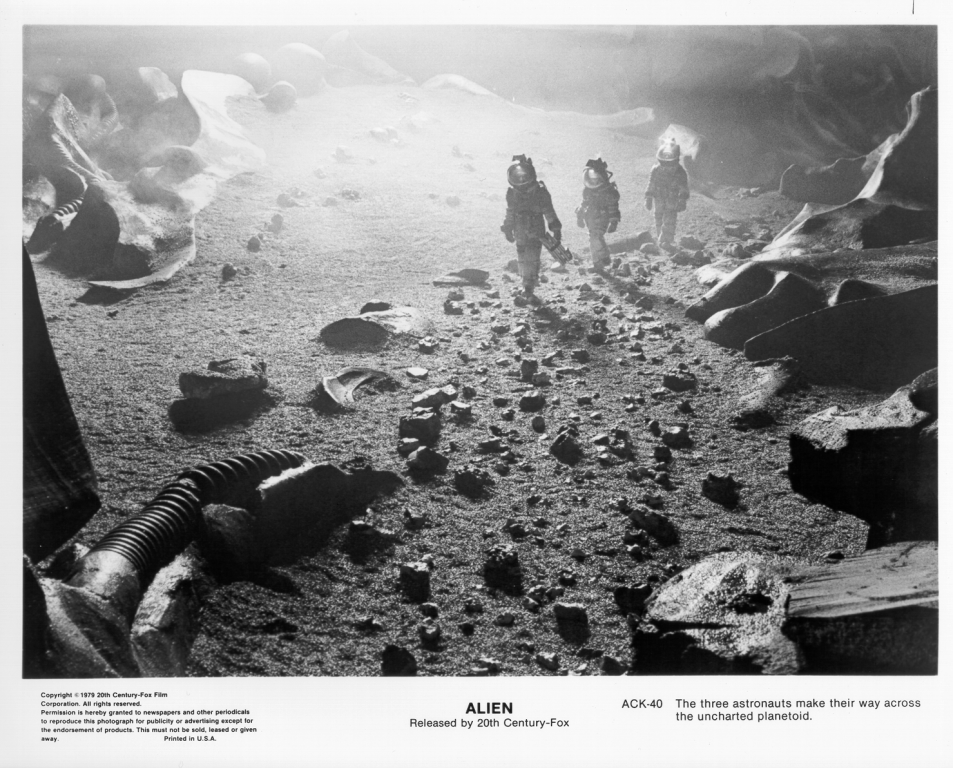
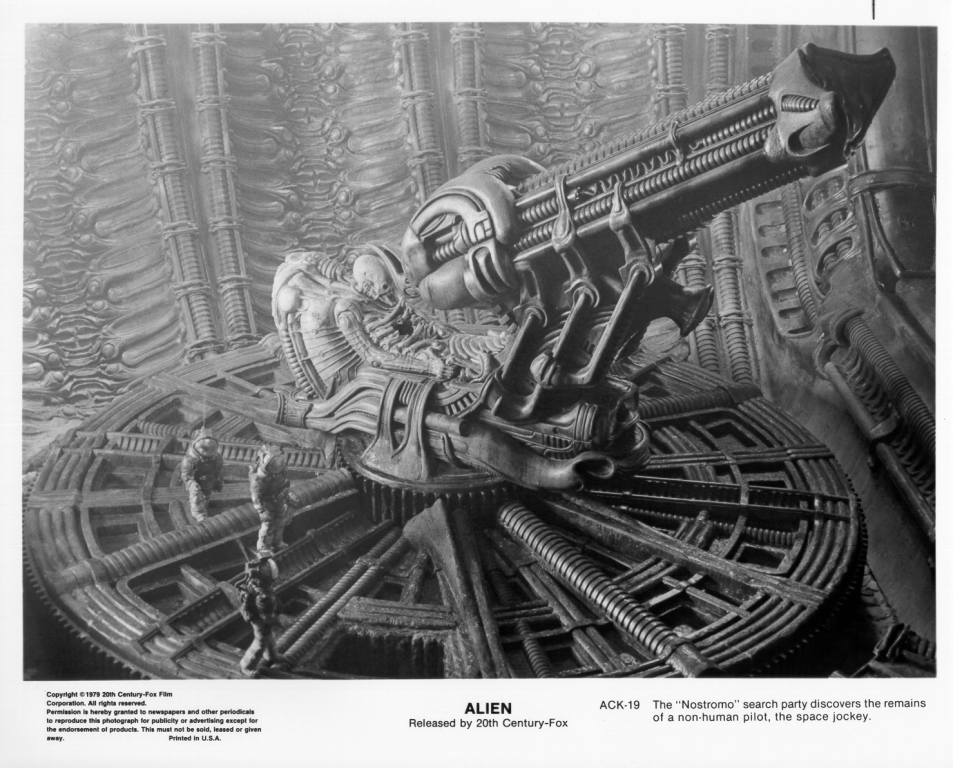
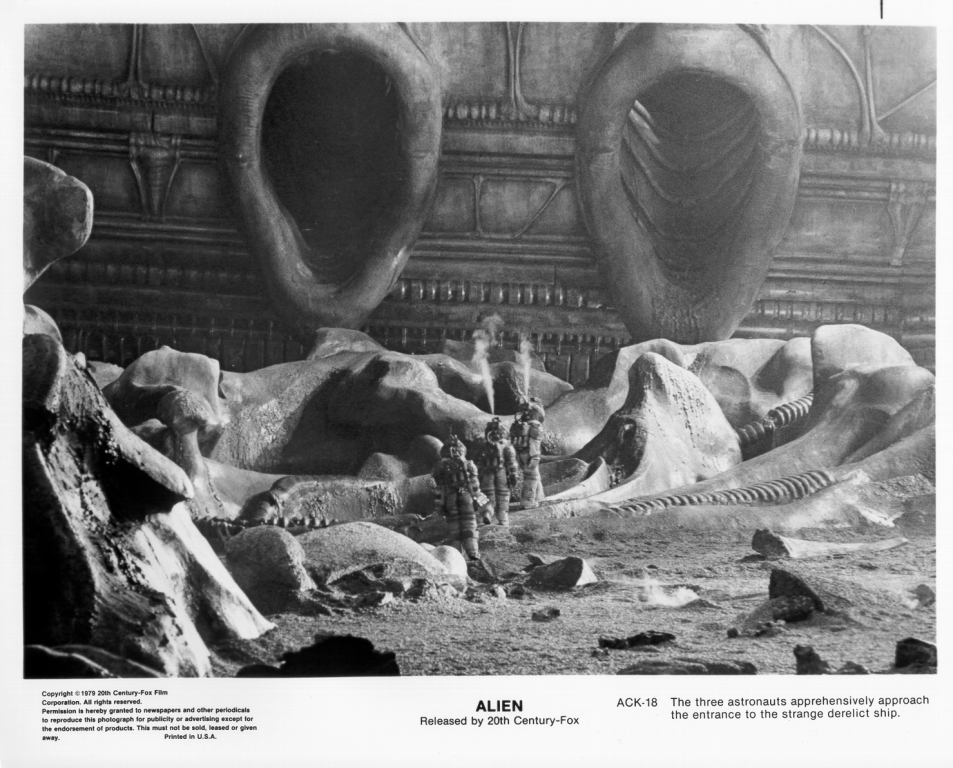
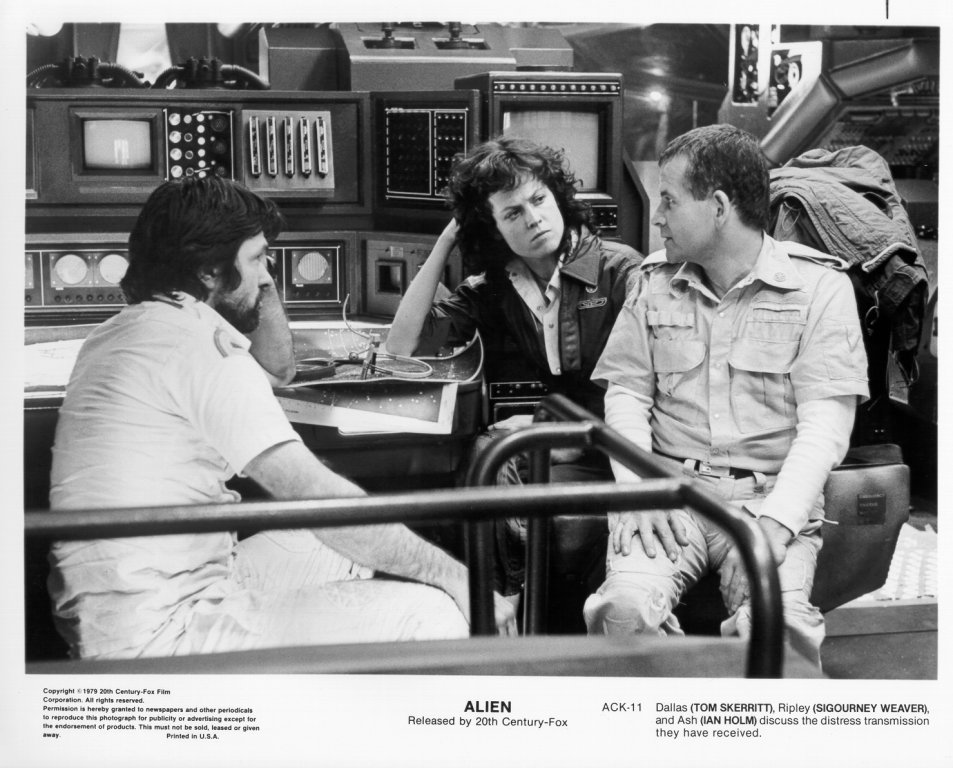
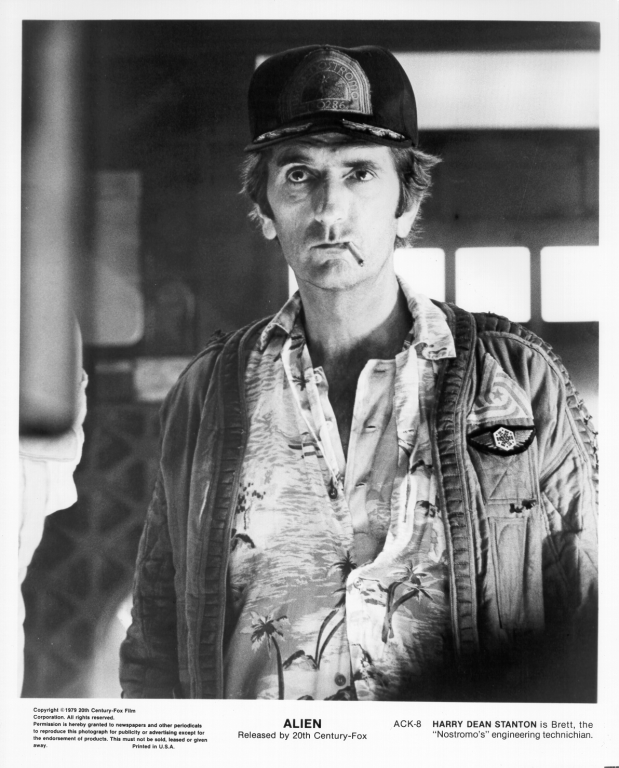
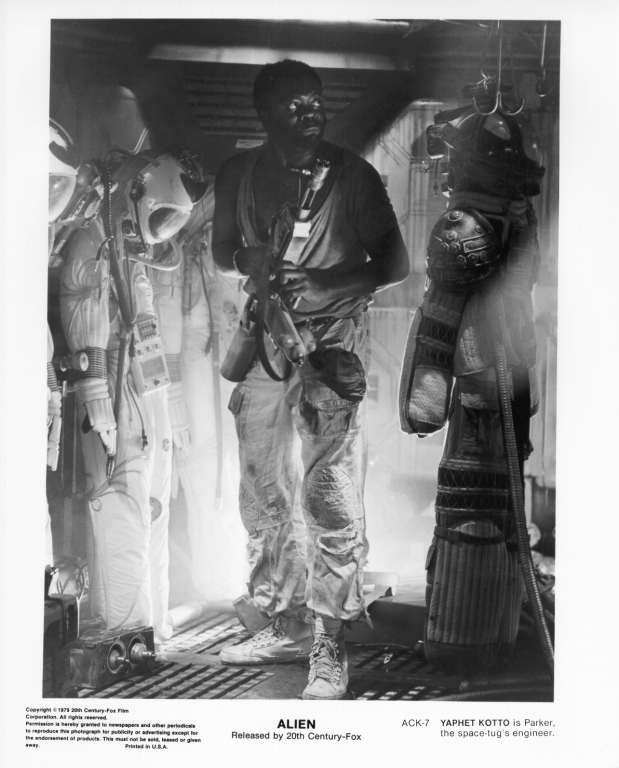
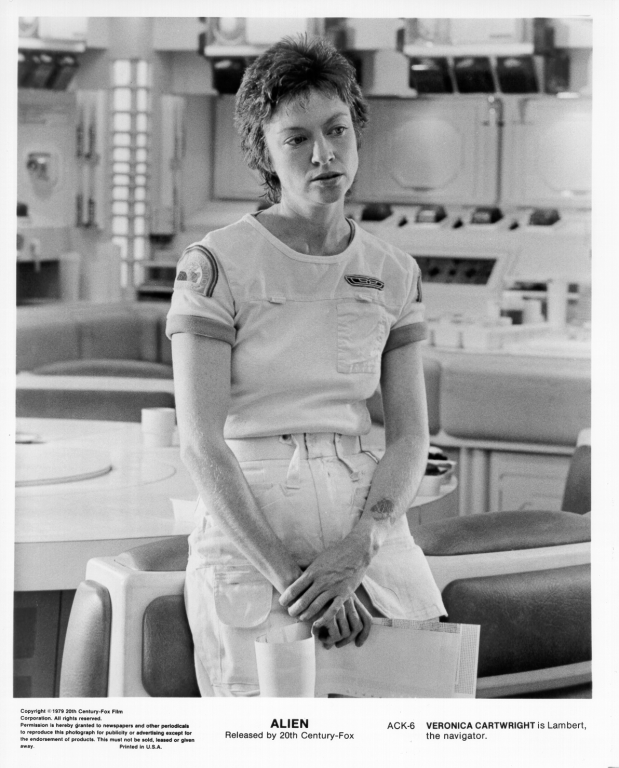
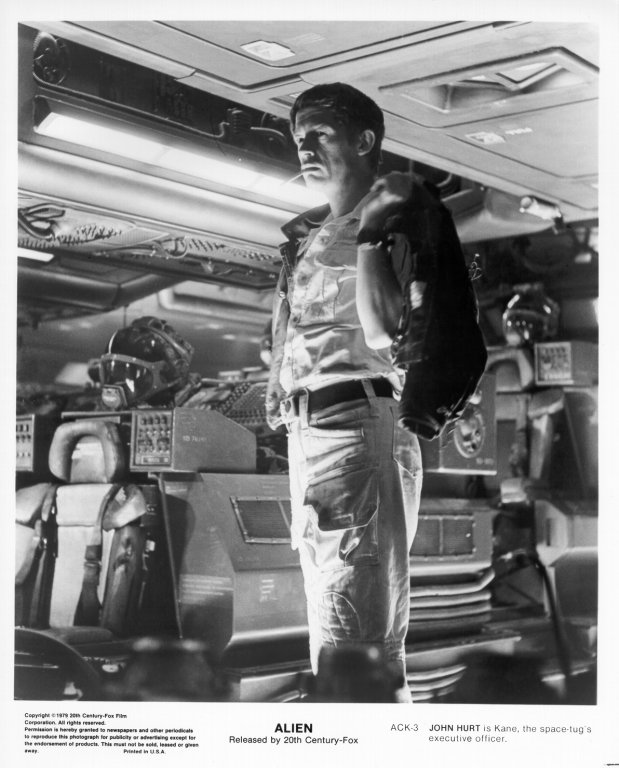
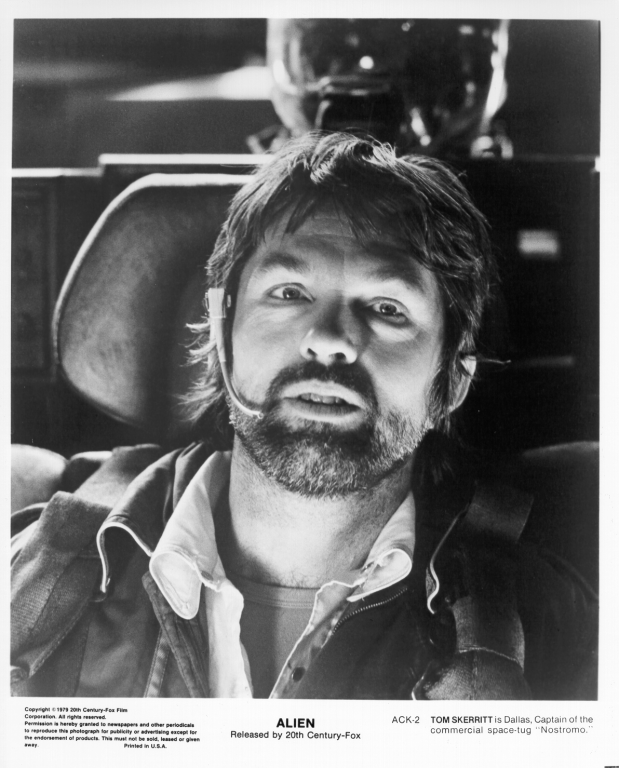
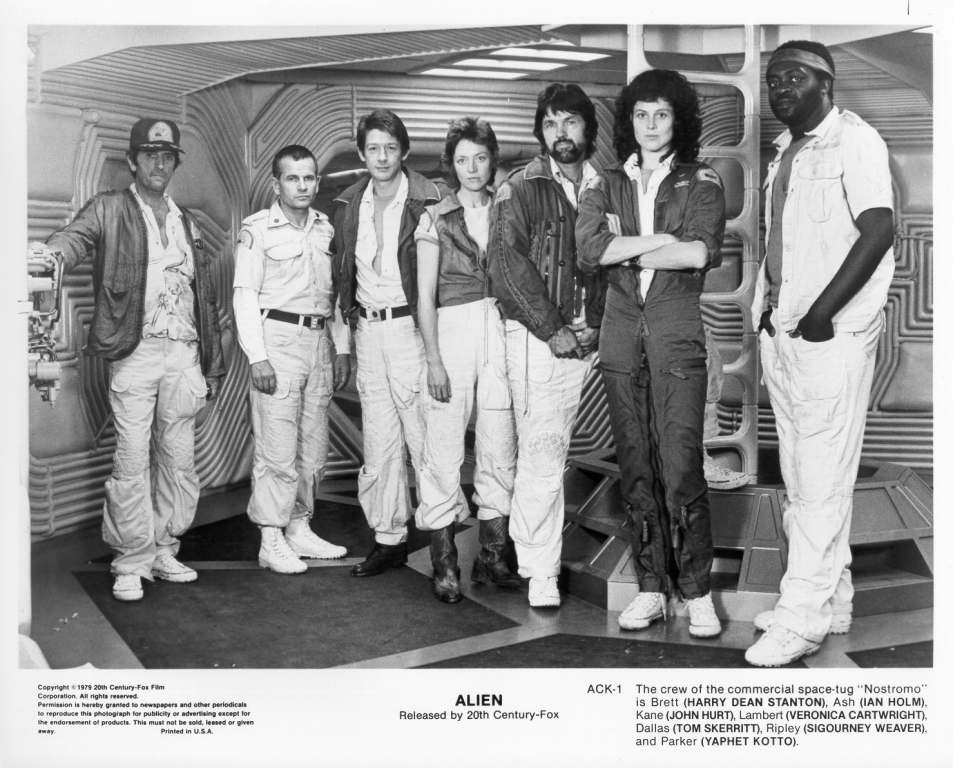
Alien
I found an old collection of movie stills that I scanned from the original “still sets” perhaps 20 or so years ago. Unfortunately the image resolution is not ideal as disk space was expensive back in the day. I remember the A3 SCSI scanner I used, must have cost a fortune. I’m also surprised the CD was still readable. I still have a few of the original sets so perhaps I’ll rescan with some modern equipment, someone may be interested.
I start with the classic Alien from 1979. There are color versions elsewhere on the internet but these particular ones were black and white.










2018 SA Pearcey Entrepreneur Award
An Enjoyable evening at the 2018 SA Pearcey Entrepreneur Award presentation.
Prof. Mike Miller (2017 Pearcey Medalist) presenting the award to Tony Clark.
Tony Clark is an Emmy Award winning Cinematographer and co-founder of several companies including Rising Sun Pictures.

For more information about the Pearcey Awards please visit the Pearcey Foundation web site.
ADS-B Range Testing – Part 2
I ordered the Flightaware bundle from WiFi Expert (antenna, USB pro stick dongle, cable and filter) via there eBay store The idea was to compare it my homemade antenna and NooElec dongle setup. While I know this is not the ideal setup with the LNA inside the dongle it is a worth testing to see what the results can be with a simple off the self setup.
I initially set it up in the backyard, to verify that it was indeed in operating order – it was. Always better to find out before you install it on the roof 🙂 Two days running it there indicated that the performance was no worse than my current setup. This was promising as my backyard isn’t ideally suited for line of sight to anything and to pretty much get the same response as the antenna on my roof indicated the results should be good.
Update 2016-06-04 & 06-25
Roof installation happened today. Quite painful with the high pitched roof and plenty of bird shit under the TV antenna. I removed the old home made antenna and replaced it with the Flightaware one. It’s nice to use proper pole clamps and fixings rather than my hacked up pipe clamps and cable ties – the result felt much more solid.
The old antenna also showed signs of rusting at the F connector – I wonder how long it would have survived in working order? Maybe I should tape up the connectors using self amalgamating tape? Something to look into I guess.
So one day later here are the results.
Range: Generally much better, the long range detection stretching out towards 500 km. I still have issues with detection towards the east sue to the hills which is expected. Range isn’t everything of course.
Message Count: The other major difference I can see is many more messages per second.
I have been able to detect planes landing and tacking off Adelaide airport while they are still located within the airport grounds. Previously I wouldn’t detect them until they were much further out/higher in altitude. A similar result can be seen at Parafield airport. The updated ModesDeco2 map really shows the extended range.



Conclusion – is it worth it?
If I was just starting and wanted something simple that just works then yes I’d probably pay for the bundle and it would be job done. The range and performance is very good.
However if you prefer to make your own then you can get almost the same results with a $10 dongle, some coax cable and a bit of handy work.
If you add an LNA and ADS-B filter to your home brew setup I think you would get the same if not better results than the Flightaware bundle – and this might be my next test.
ADS-B Range Testing – Part 1
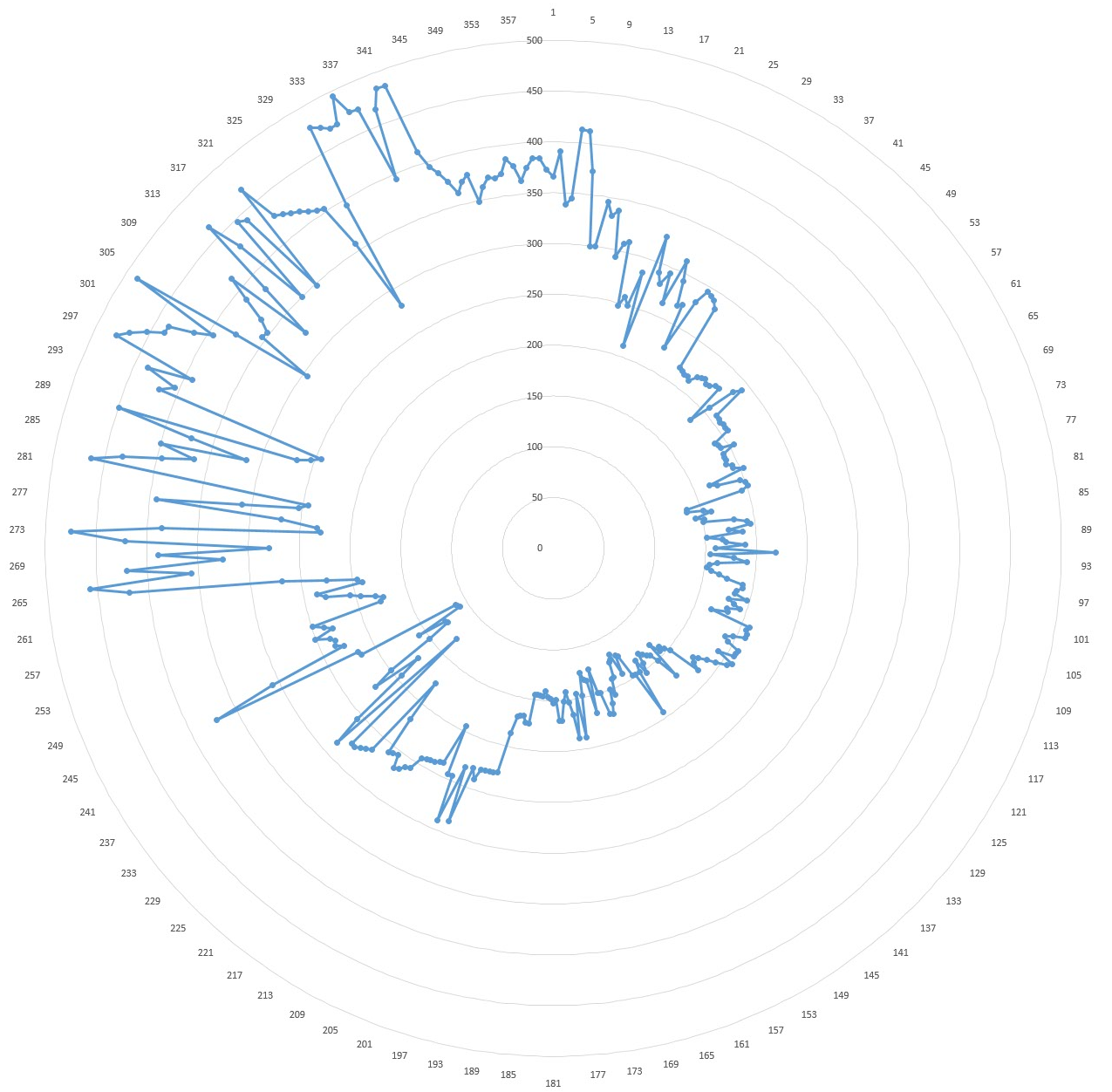
Long ago I set up and ADS-B receiver with the standard RTL SDR dongle and Raspberry Pi. It runs a combination of modesdeco2 and modesmixer2. The default web interface has a nice radar range graph, but each time you reboot the Pi the range data is gone. I have a piece of software that decodes the ADS-B stream and calculates range and azimuth data for current planes (i.e. location data updated within the last 10 seconds) among other things.
I thought I’d add the ability to save this data to a database so I can graph it and perhaps compare different setups, receivers, antenna, LNA’s and filters.
Here is the baseline graph for about a week ending 2016-04-25. My location is on the slope of a plain that runs north to south and up hill to the east. You can clearly see I have less line of sight visibility in that direction. However to the west the range is pretty good.
The setup is
- NooElec NESDR Mini 2
- Hand made 12 (or 13?) element coaxial cable antenna located on the roof
- Perhaps 15 meters of RG6 between the antenna and the Raspberry Pi
UPDATE 2016-05-06
While waiting for parts to arrive I decided to try shielding the dongle with copper tape. To make it look somewhat neat I opened the case of the dongle and put the tape in the inside. The plan worked but the plastic and copper on the bottom of the dongle is quite close to the PCB so I added a layer of normal tape to the bottom of the PCB to stop shorts. The copper connects to the shield of the USB connector and the surround of the RF connector and encases the entire inside of the dongle. (I’ll add a photo of it later)
Anyways does it help with range? Perhaps, its hard to tell with ADS-B here in Adelaide as we don’t see a huge amount of traffic, and week to week variations could account for changes – who knows – anyway here is the update range graph with data up to 2016-05-06 including the baseline data.
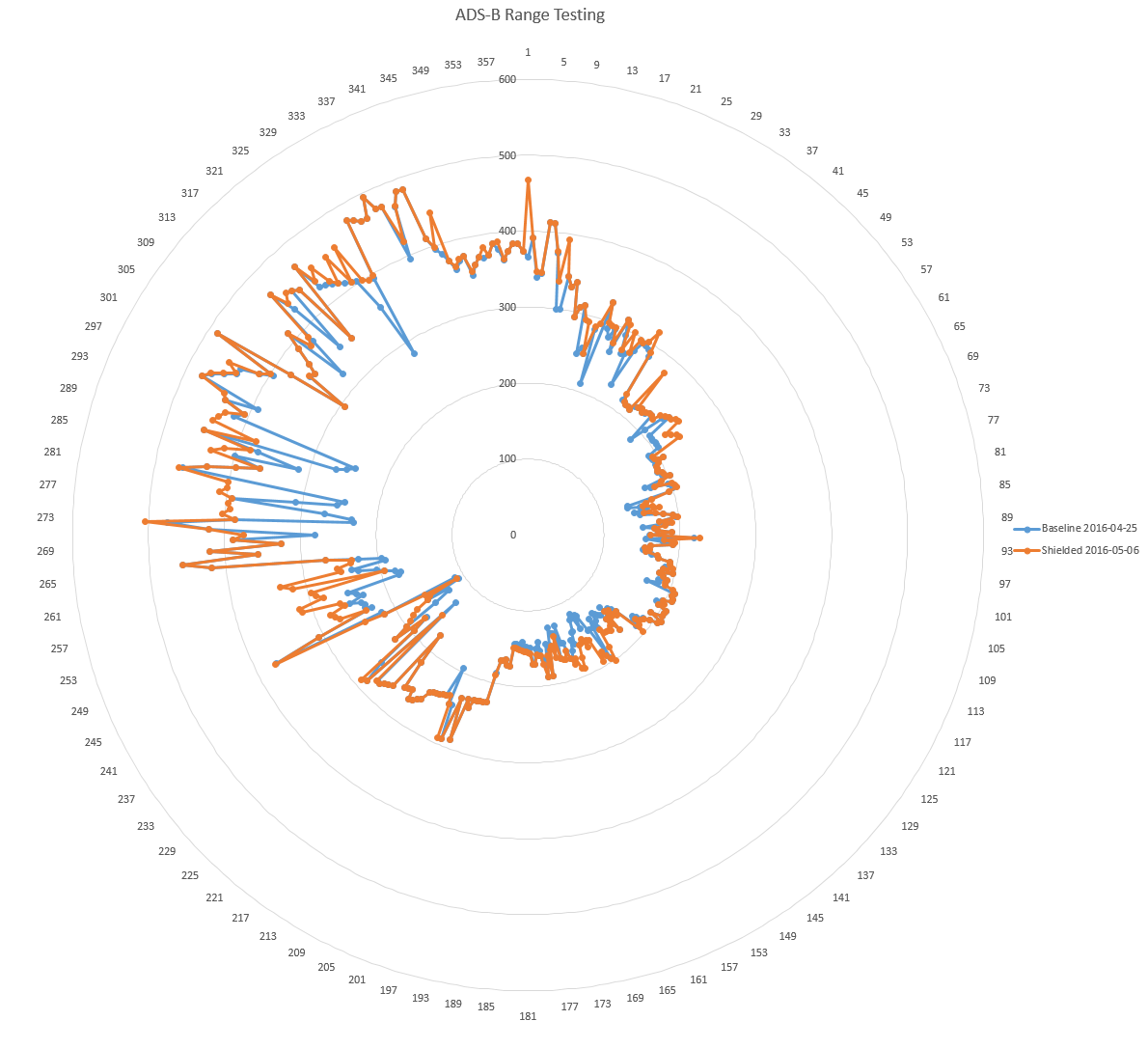
In general, a small increase in range in all directions, with a larger increase to the west, pushing out towards 500 km.
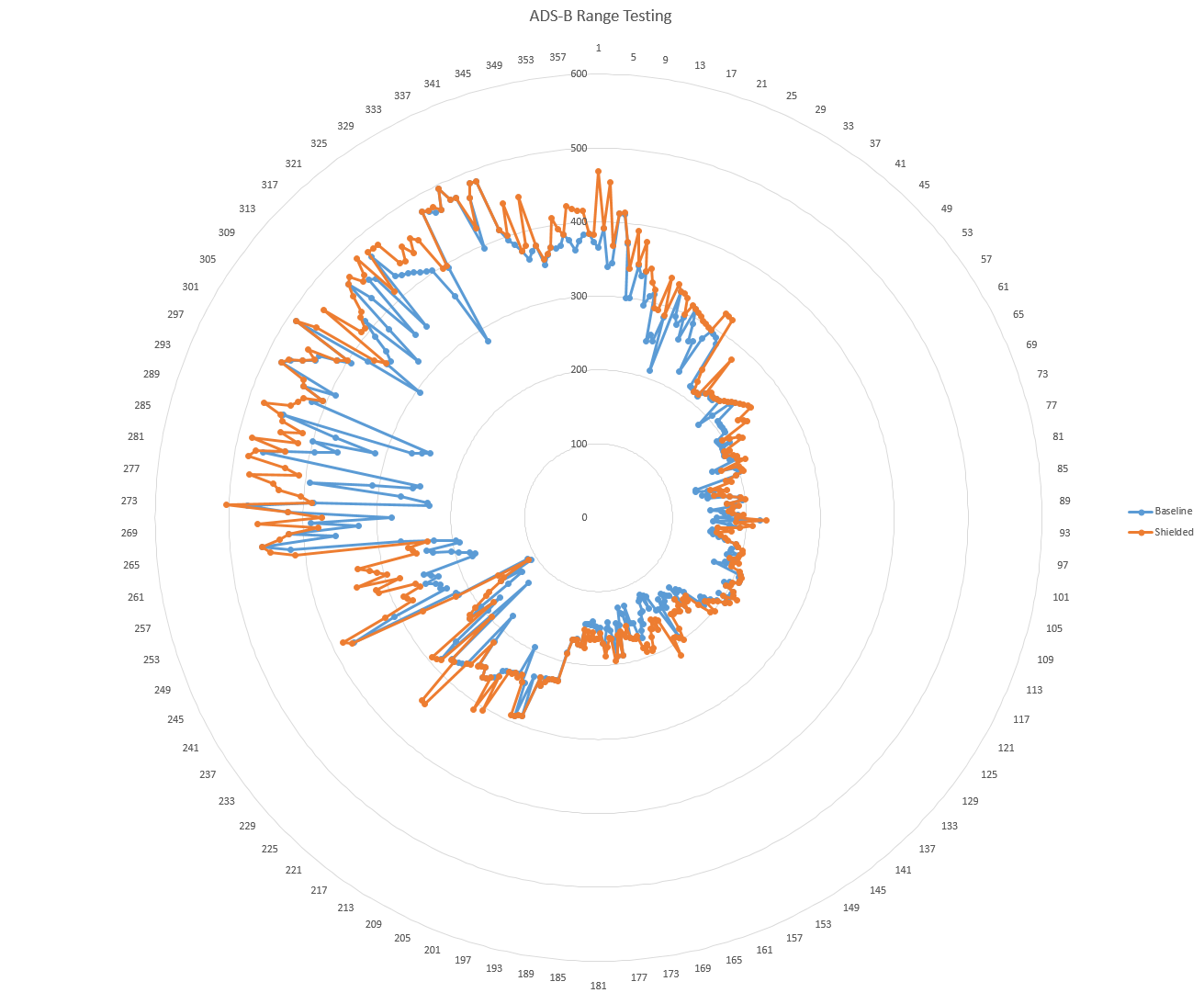
UPDATE 2016-05-28
It turns out I forgot to order the new parts … too busy I guess … so it still will be a while before I get the new parts delivered and installed. In the mean time the shielded dongle has been running for almost a month so we can now get an updated range graph. It generally shows the same as the last update but this time you can see the improvement more easily. For reference I’ve include my current modesdeco2 range so you can get an idea of the area around Adelaide I can see.

Ubuntu LVM Boot Recovery
Just leaving these notes for next time rather than search the interwebs again.
- Reboot
- At the boot options screen select the Advanced Ubuntu item, then the recovery item
- At the menu that appears select root command line
- mount -o remount,ro
- fsck.ext4 -y /dev/mapper/appserver–vg-root
- exit
- resume boot
I needed to reboot again to get the boot file system check to perform and get back to read write mode. Still not sure how it got into this state in the first place though ..
Busy
New job – I can eat again – nice! New job – no time to write up any blogs – boo!
Touch Switch Hack Part 1
A (long) while ago I did a post on some touch light switches I acquired. The single button one is still running in the office with no problems. I figured I’d have a go at trying to get the 4 button one to work without mains.
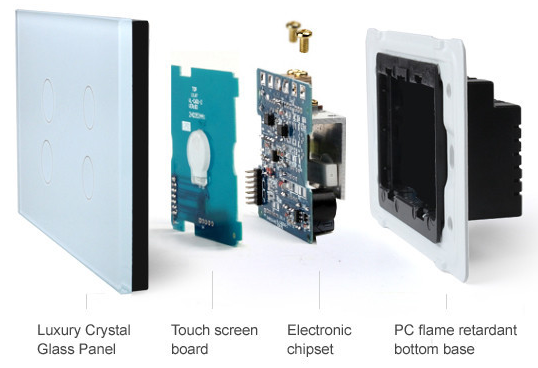
The switch has
- a glass front plate
- a top PCB with the PIC, LEDs and touch pads
- a base PCB with the relays and mains terminals
I took it apart to get the top PCB. It has a clear silkscreen with vias labeled with 3V and 12V. The 3V via went to the VDD pin of the PC, so seems like it runs off 3V provided by the base PCB. Knowing the PIC pin out gives us a GND point on what looks like a programming header.
I traced/buzzed out 4 of the other header pins that control the relays.
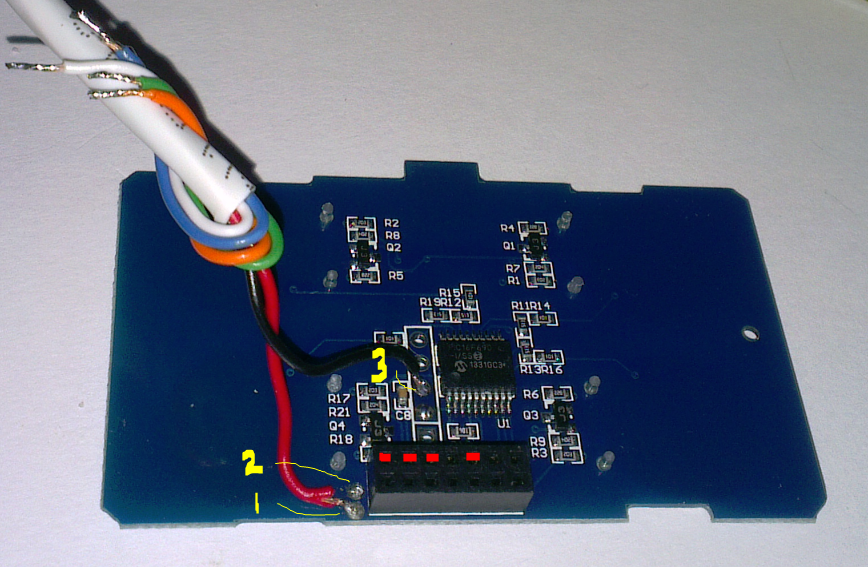
(1) is the 3V point, (2) is tht 12V point, (3) is GND, The red dots are the control lines for the 4 relays.
First Test
First test is just to apply 3V and GND to the top PCB only – if it works I can just supply power and take the control lines for the relays to my input modules.
So it powered up, but immediately went into a sequence of alternately red/blue LED every 2 seconds. Oh well not much use, but worth a try,
Second Test
Maybe it needs the 12V for something? This time I applied 12V and GND, connected the top and bottom boards together and powered up.
Again it powers up, the 3V rail is generated and the PIC once again works. However the same 2 second sequence occurs, this time with the relays also changing state in time with the LEDs.
Other Tests
Maybe it needs the glass plate installed to calibrate the touch sensors? nope – powered up with it assembled and still the same sequence.
So what to do next. I will reassemble everything and plug it into the mains just to be sure it actually works as expected – maybe its a dud?
If it works with the mains then at least I know its still a function unit and more hacking/testing is needed to run it on my 12V bus.